





























15-329
15-329
15.1.3. Tool
This uses the origin setting tool to set the robot origin.
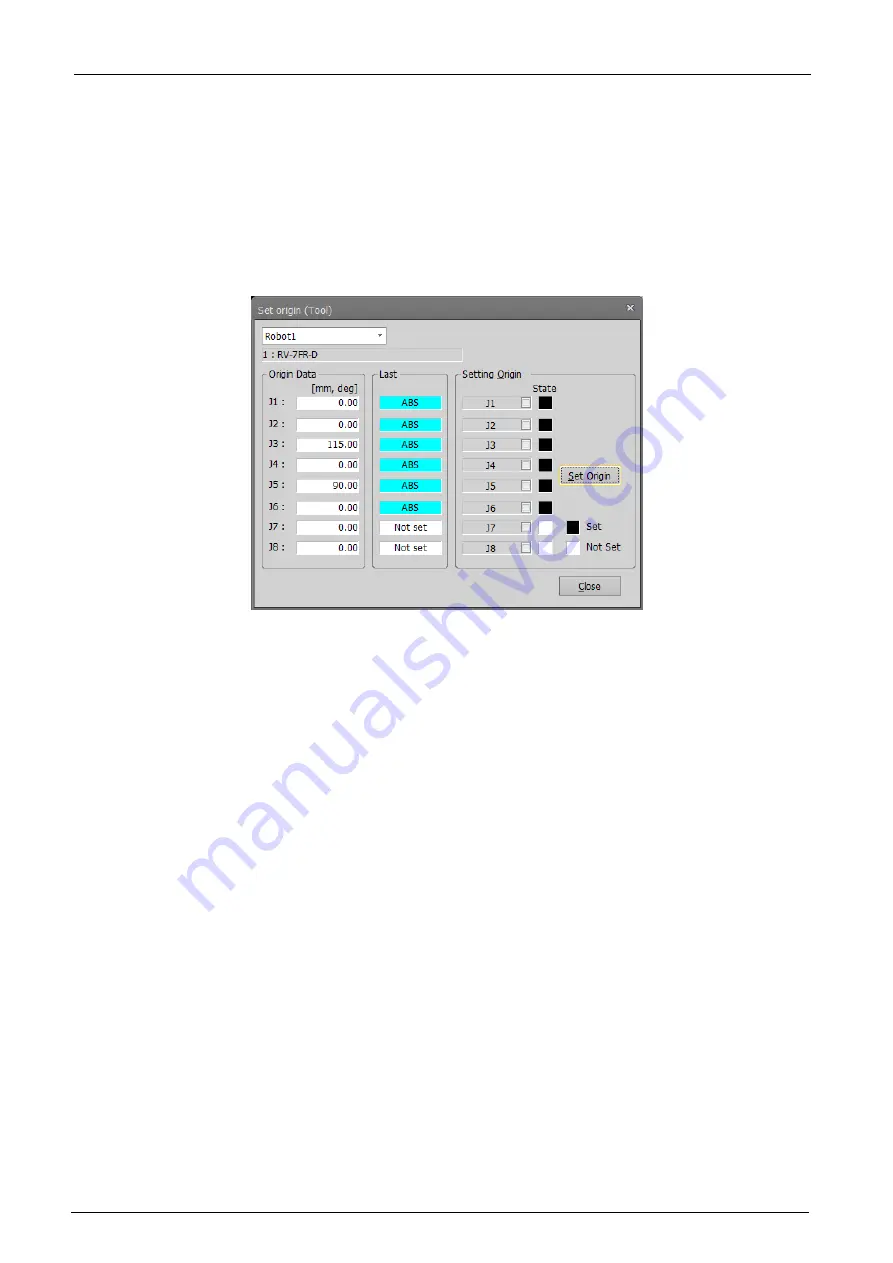
Click the origin data screen [Tool] button to display the screen.
After moving the robot to the tool origin position, select the axis to set the origin for with the checkbox, and then
click the [Set origin] button.
"Last" displays the origin setting technique used the previous time. This is sometimes not displayed for some
robot controller software versions.
Figure 15-5 Origin Setting (Tool)
In this method, wo use the tool to set the origin data for each axis. The tool is used by inserting each axis into a
pin hole for origin setting when each axis is moved to the origin position. Please follow the procedure below.
<Common to RH / RV series>
1) Release the brake and ues the jog to match the pin hole for origin setting.
2) Move the axis back and forth so that the tool passes through the pin hole.
3) End brake release and servo OFF.
4) Select the axis form the above screen and click the [Set Origin] button.
5) 1 - 4 correspond to the J1 - J2 axes of the RH series, and the J1 - J4 axes of the RV series.
< RH series >
6) Set the origin of the J3 and J4 axes at the same time. Release the brake of J3 and contacted with the + side
of the machine stopper. In this state, align the J4 axis with the mark.
7) End brake release.
8) Select the J3 and J4 axes from above screen and click the [Set Origin] button.
< RV series >
6) Set the origin of the J5 and J6 axes at the same time. First, Fix the J5 axis by the procedure of 1 - 4. In this
state, align the J6 axis with the mark.
7) Select the J5 and J6 axes from above screen and click the [Set Origin] button.
* If you need an origin setting tool, please contact our service department.
* The position of pin hole will vary depending on the model. Please refer to [Robot Setup to Maintenance].
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...