





























13-220
13-220
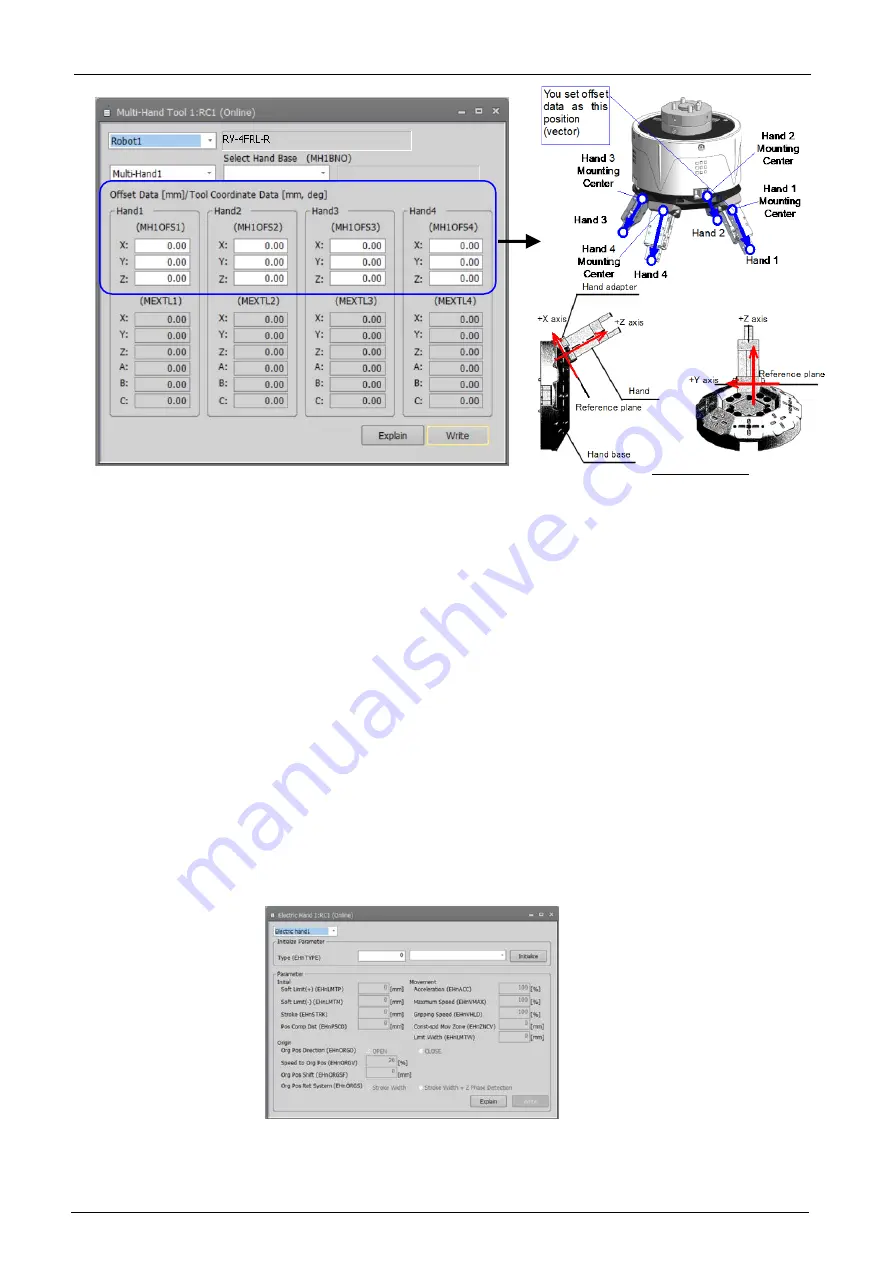
Figure 13-17
Multi-hand tool parameter
You can refer to the explanation of the displayed parameter with the [Explanation screen] button.
This parameter cannot be set by offline editing.
When multi-hand tool is connected to the robot using remote I/O, you can set behavior of output signal reset.
You can set these parameters in output signal reset pattern parameter screen.
When multi-hand tool is connected using remote I/O, these information is displayed on Board.
13.3.3.4. Erectric hand parameter
You can set
multi-function
electric hand selection and these
parameter.
Parameter settings are used while connected to the robot controller.
From the project tree, you double-click [Movement Parameter] -> [Hand] -> [Electric Hand] under [Parameter]
item to be edited.
When you click [Initialize] button, initialize parameter is initialized to electric hand parameter of the model is
selected.
After changing the parameter value, you click the [Write] button to write the parameters to the robot controller.
For robot controllers that can set parameters about multi-function
electric hand
, please see
controller that can use parameters about electric hand”.
Figure 13-18 Electric hand parameter
You can refer to the explanation of the displayed parameter with the [Explain] button.
Set offset data
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...






























































