





























21-514
21-514
can be changed.
The name is changed according to the display information, and "Opened spline file" or "01(PC)", for example,
indicating the specified spline file is displayed.
(7) Layout objects
When these are selected, the display information relating to layout objects is displayed at "Properties" and
can be changed.
The [Name] set in the display information is displayed as the name.
21.4.2. Operations in layout tree
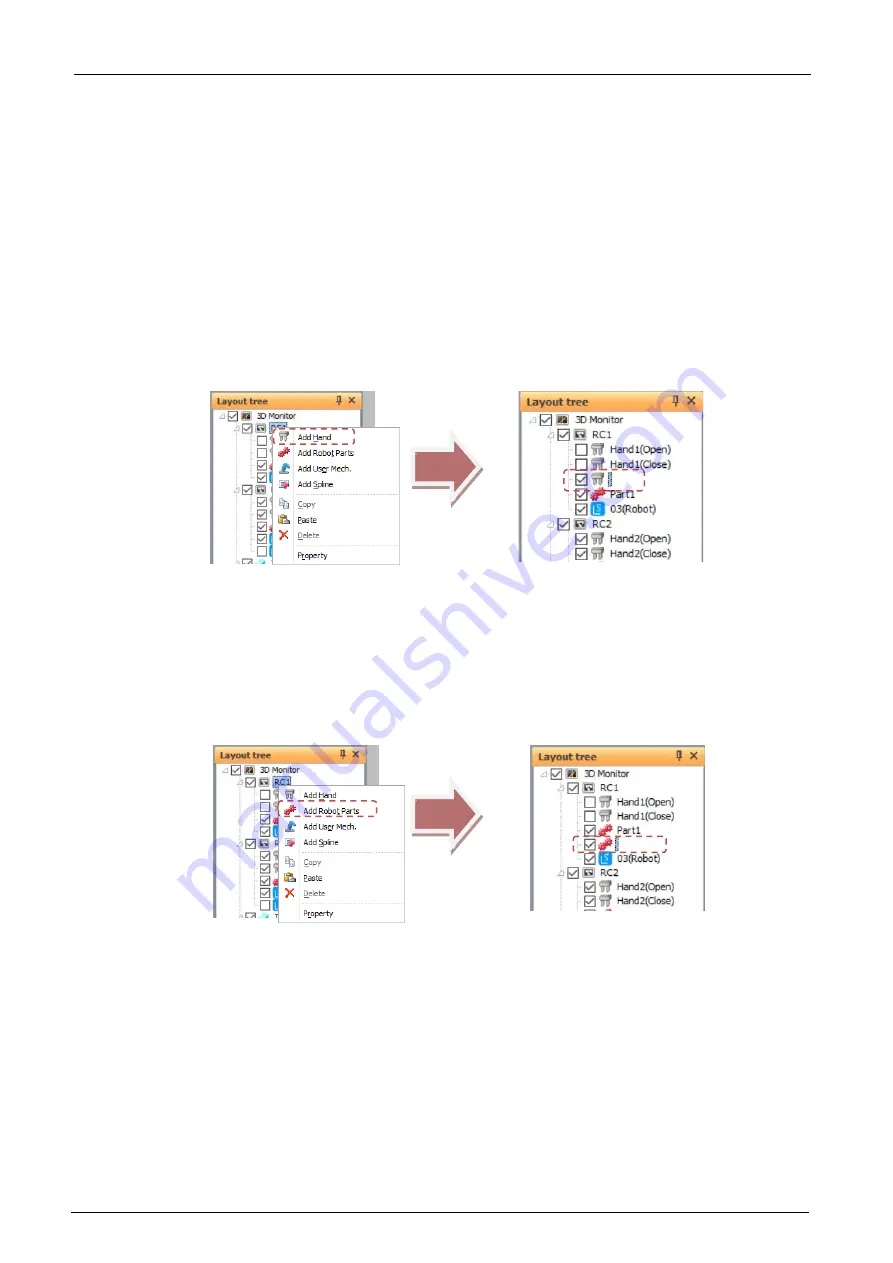
21.4.2.1. Add hand
To add a hand to the layout tree, right-click the robot to add the hand to, and select [Add hand] from the context
menu. A hand item will be newly added at the bottom of the list of hands. Or, a hand can be added immediately
under a specific hand by right-clicking that hand and selecting [Add hand].
Next, set the display information, for example, by selecting [Hand Name] at "Properties".
Figure 21-15 Add a Hand Item
21.4.2.2. Add robot parts
To add a robot part to the layout tree, right-click the robot to add the robot parts to, and select [Add Robot Parts]
from the context menu. A robot part item will be newly added at the bottom of the list of robot parts. Or, a robot
part can be added immediately under a specific robot parts by right-clicking that robot parts and selecting [Add
robot parts].
Next, set the display information, for example, by selecting [Robot Parts Name] at "Properties".
Figure 21-16 Add a Robot Parts Item
21.4.2.3. Add user mechanism
To add a user mech. to the layout tree,right-click the robot to add the user mech. ,and select [Add User Mech.]
from the context menu.The user mech. item will be newly added at the bottom of the list of robot parts.Or, a user
mech. can be added immediately under a specific user mech. by right-clicking that user mech. and selecting [Add
User Mech.].
Next,set the display information ,for example,by selecting [User Mech. Name] at “Properties”.
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...