





























18-458
18-458
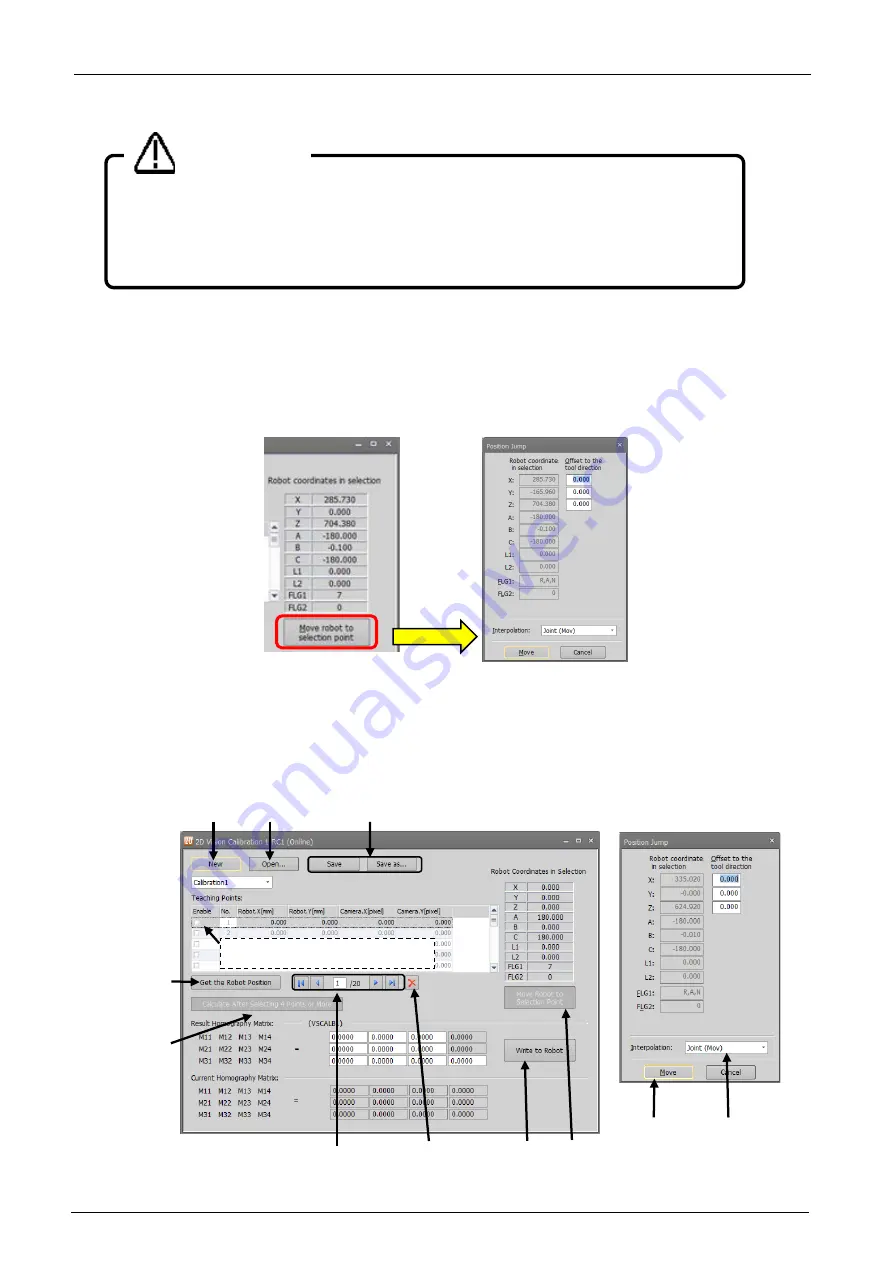
(7) Other function
・
Move robot to selected point
Click the [Move robot to selection point] button to move the robot to the position selected on the list of
[Teaching points].
Indicate the trajectory in Mov (Joint interpolation movement) and MVS (Linear interpolation movement).
You can specify the offset (unit [mm]) in the tool coordinate system. For example, when a Z direction offset of
“-50” is specified, the robot moves to a position shifted 50mm toward the Z direction in the tool coordinate
from the teaching point.
Note that the orientation of the tool coordinate system differs between vertical robots and horizontal robots.
Figure 18-66 Move the robot to selected point
18.5.3. 2D vision calibration screen
This section explains each button on the 2D vision calibration screen.
Figure 18-67 2D vision calibration screen
(2)
(4)
(5)
(8)
(9)
(10)
(11)
(1)
(6)
(7)
Check to be used for calculation.
The robot may operate at 100% speed. Pay attention to
safety around the robot.
Also, keep a T/B at hand and use the robot in a status in
which an emergency stop can be made at any time.
Danger
(3)
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...






























































