





























7-6
Section
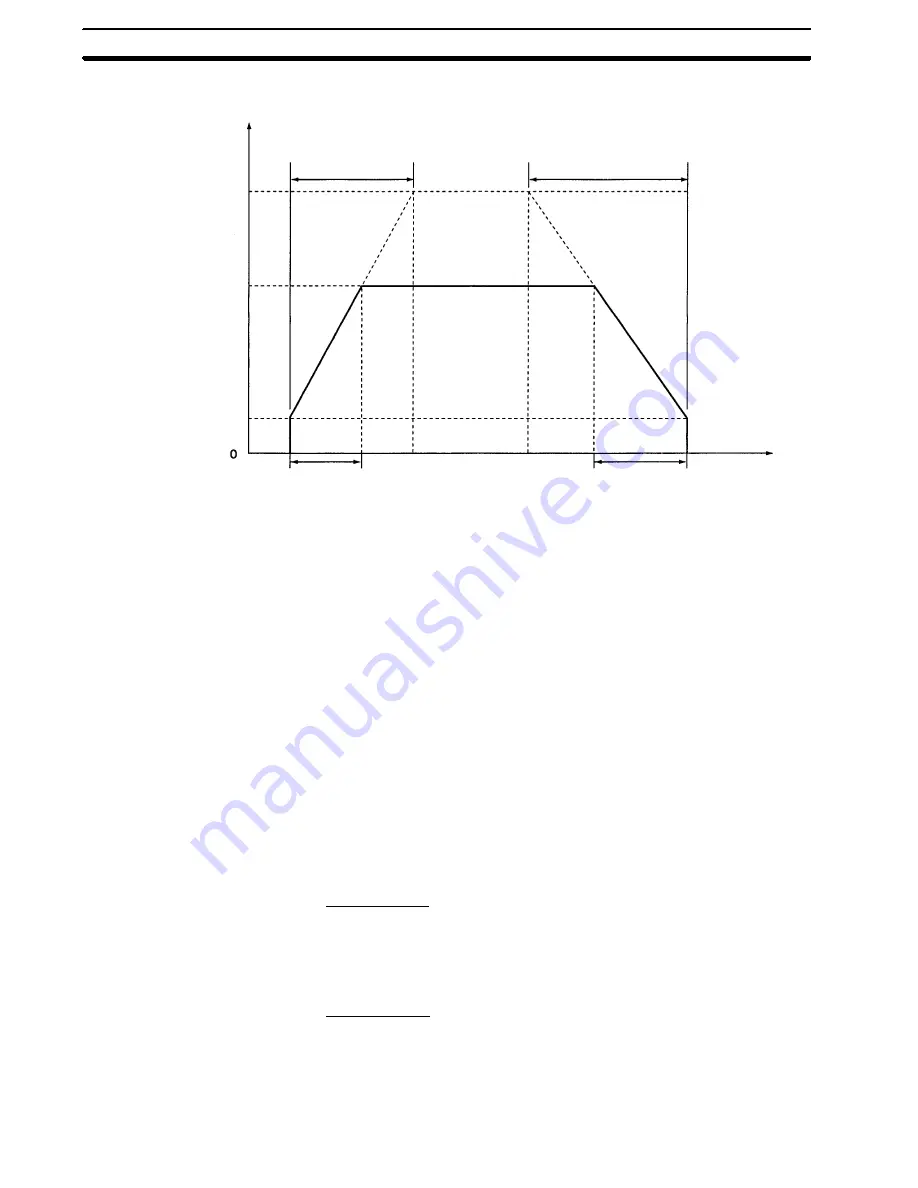
Acceleration/Deceleration
166
•
Deceleration time, Td (ms)
Speed
Maximum speed
V
MAX
specified with
parameters
Speed V
1
Initial speed V
0
specified with
parameters
Actual
acceleration
time T
1
Actual
deceleration
time T
2
Time
Acceleration
time Ta
Deceleration
time Td
Note
If override is enabled (i.e., the Override Enable Bit is ON), the speed will be as
follows:
Speed = Operating data area’s speed setting
×
Operating data area’s override
setting
÷
100.
7-6-2 Calculation of Acceleration/Deceleration Times for Continuous
Positioning
The actual acceleration and deceleration times when a command for a new posi-
tioning operation is made during direct operation can be calculated in the way
shown below.
Case 1: Speed for the Next Positioning Operation is Faster
Actual acceleration time, T
1
= (V
1
-- V
0
)/(V
MAX
-- V
0
)
×
Ta
Actual acceleration time, T
2
= (V
2
-- V
1
)/(V
MAX
-- V
0
)
×
Ta
Actual deceleration time, T
3
= (V
2
-- V
0
)/(V
MAX
-- V
0
)
×
Td
•
The following axis parameter settings are used:
•
Maximum speed, V
MAX
(pps)
•
Initial speed, V
0
(pps)
•
The following operating data area settings are used:
First Command
•
Position
•
Speed, V
1
(pps)
•
Acceleration time, Ta (ms)
•
Deceleration time, Td (ms)
Next Command
•
Position
•
Speed, V
2
(pps)
Note
When the designations for the next positioning operation are given during
operation, T
2
and T
3
are calculated using the acceleration time Ta and decelera-
Summary of Contents for CS1W-NC113 - REV 02-2008
Page 1: ...CS1W NC113 213 413 133 233 433 Position Control Units ...
Page 2: ...iv ...
Page 4: ...vi ...





















































