





























1-4
Section
Control System Principles
12
1-4-2 Control System Principles
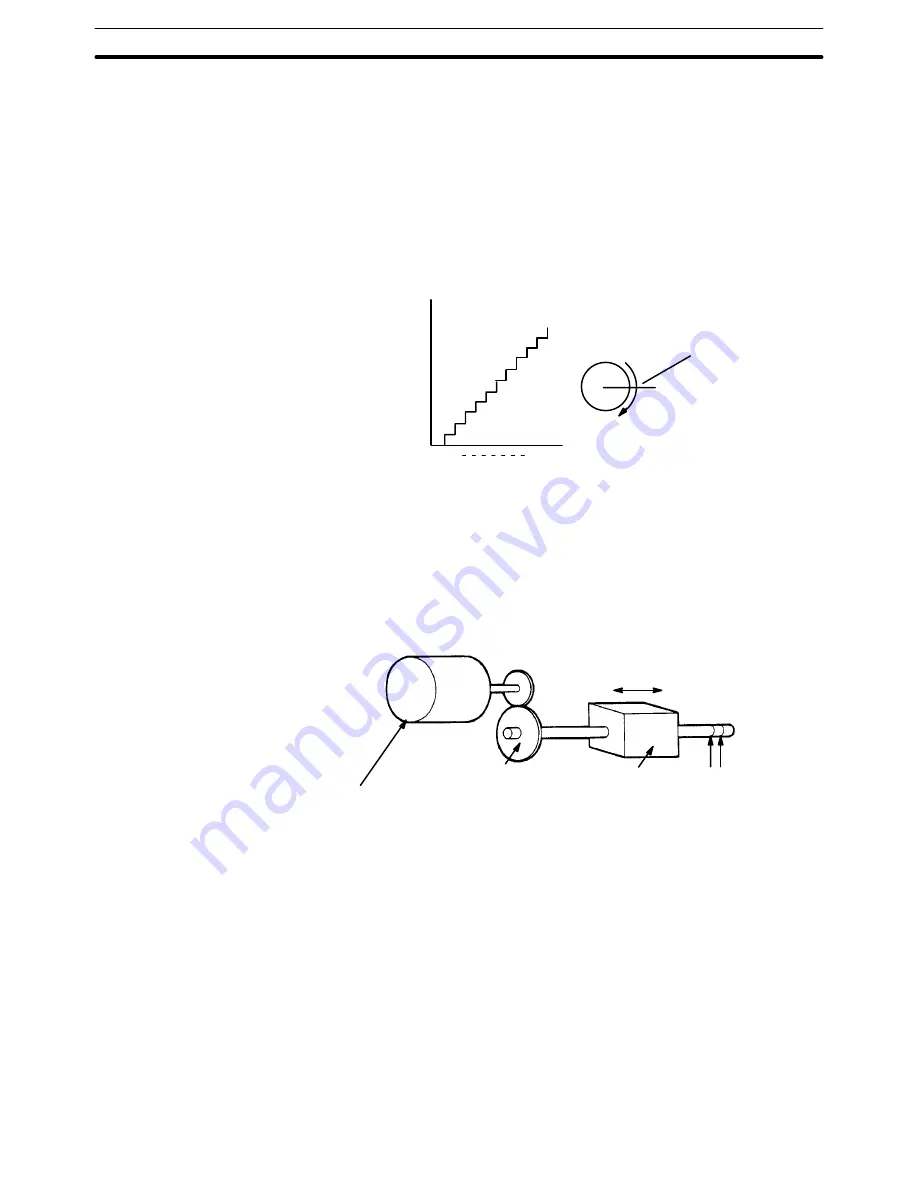
In an open-loop system, positioning is controlled according to the number of
input pulses that the motor receives, and no position feedback is provided. The
C200HW-NC113/NC213/NC413 PCUs all employ pulse-output-type open-loop
systems, and the most commonly used motor for this type of control system is a
stepping motor. The angle of rotation of a stepping motor can be controlled
through the number of pulse signals supplied to the motor driver. The number of
rotations of the stepping motor is proportional to the number of pulses supplied
by the PCU, and the rotational speed of the stepping motor is proportional to the
frequency of the pulse train.
Positioning pulses
1 2
n
Positioning output
Angle of
rotation
Angle of rotation
1-4-3 Basic Positioning System Design
The following diagram and parameters illustrate a simplified positioning system.
M : Reduction ratio
P : Feed screw pitch (mm/revolution)
V : Feed velocity of object being positioned (mm/s)
θ
s
: Stepping angle per pulse (degree/pulse)
P
Stepping motor
Reduction gear
Object being
positioned
N
M
V
Feed screw pitch
The positioning accuracy in mm/pulse is computed as follows:
Positioning accuracy
= P/(pulses per revolution x M)
= P/((360/
θ
s
) x M))
= (P x
θ
s
)/(360 x M)
The required pulse frequency from the PCU (pulses/second) is computed as fol-
lows:
Pulse frequency
= V/Positioning accuracy
= (360 x M x V)/(P x
θ
s
)
And the required number of pulses to feed an object by a distance L in mm is
computed as follows:
Number of pulses
= L/Positioning accuracy
= (360 x M x L)/(P x
θ
s
)
Open-Loop System
Summary of Contents for C200HW
Page 1: ...Cat No W334 E1 04 Position Control Units SYSMAC C200HW NC113 NC213 NC413 ...
Page 2: ...C200HW NC113 NC213 NC413 Position Control Units Operation Manual Revised July 2003 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 285: ...Cat No W334 E1 04 C200HW NC113 NC213 NC413 Position Control Units OPERATION MANUAL ...





















































