





























9-8
9.3 Operating command setting method
Operation via keypad RUN key and STOP/RST key (Modality 0)
Group
Code Parameter Name
Setting
Range
Initial
Unit
Drive group
drv
[Drive mode]
0
0 ~ 3
1
drC
[Direction of motor rotation
select]
-
F, r
F
Set
drv
– [Drive mode] to 0.
Acceleration is started upon pressing the Run key if operating frequency is set. Motor
decelerates to stop by pressing the STOP/RST key.
Selecting rotation direction is available at
drC
- [Direction of motor rotation select] when
operating command is issued via keypad.
drC
[Direction of
motor rotation
select]
F Forward
r
Reverse
When remote keypad is connected, body-embedded keypad is
deactivated.
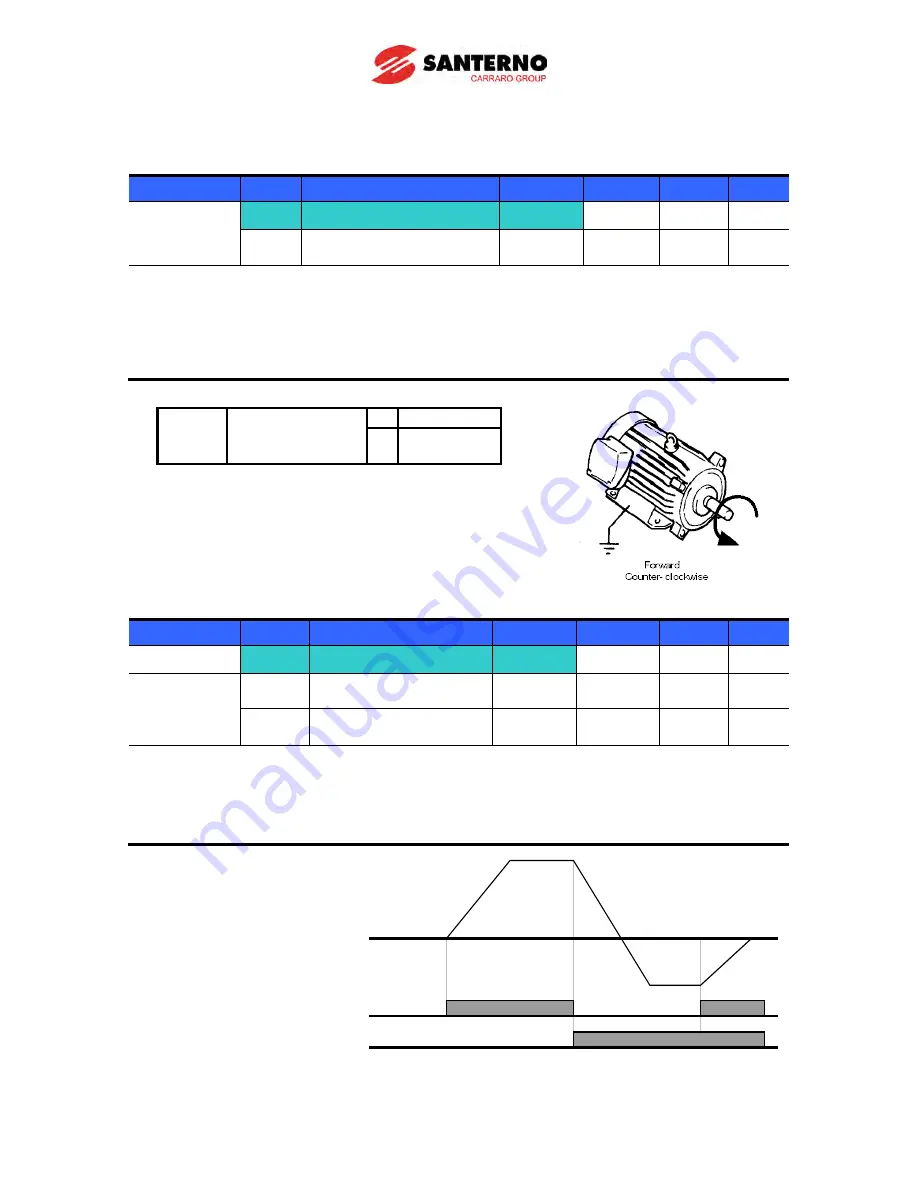
Operating command via FX, RX terminal (Modality 1)
Group
Code
Parameter Name
Setting
Range
Initial
Unit
Drive group
drv
[Drive mode]
1
0 ~ 3
1
I/O group
I17
[Multi-function input
terminal P1 define]
0
0 ~ 29
0
I18
[Multi-function input
terminal P2 define]
1
0 ~ 29
1
Set
drv
– [Drive mode] to 1.
Set I17 and I18 to 0 and 1 to use P1 and P2 as FX and RX terminals.
“FX” is Forward run command and “RX” Reverse run.
Motor is stopped when FX/RX
terminal is ON/OFF at the same
time.
FX
RX
Freq.
Summary of Contents for Sinus M
Page 10: ......
Page 15: ...1 5 Notes...
Page 16: ......
Page 50: ...6 4 Notes...
Page 78: ...8 4 Notes...
Page 114: ...10 14 Normal PID block diagram H54 0...
Page 115: ...10 15 Process PID block diagram H54 1...
Page 150: ...10 50 Notes...
Page 174: ......
Page 192: ...13 18 Notes...
Page 204: ......
Page 219: ...17 1 CHAPTER 17 EC Declaration of Conformity...







































































