





























PIT>>TAIL
Phase-dependent static torque compensation
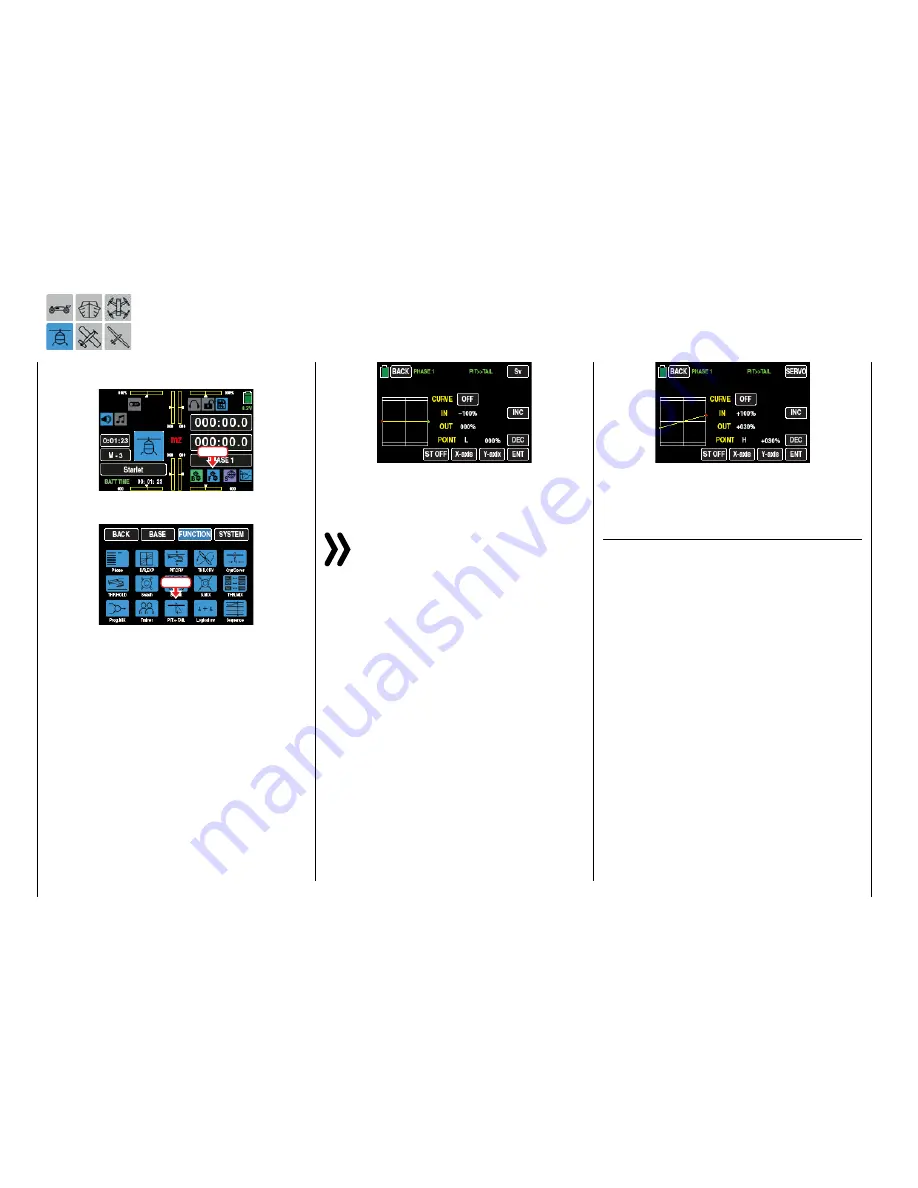
In the basic transmitter display, use your finger or the
provided stylus to touch the gear icon labeled "F":
Touch
The display switches to the blue function menu. Touch
the menu item "
PIT >> TAIL
:":
Touch
Phase-dependent settings
The here mentioned sub-menu offers the possibility
of phase specific settings. Recognizable on the top
left side of the display in green color is displayed the
phase name. As standard is displayed the name of the
phase 1, which is indicated by the name "NORMAL"
or "PHASE 1". As soon as you will have defined one
or many other phases in the "
PHASE
" menu, you will
be able to switch among those phases. Activate the
corresponding switch or switches if desired to switch
between the phases.
Introduction
A torque compensation curve with a linear mixer ratio
of 0% is uniformly set by default which is necessary
for gyro sensors that operate in heading-lock mode:
If you are using your gyro sensor in normal mode or
the sensor can only handle normal mode, adjust the
mixer as follows:
Notice
You therefore need to consult your gyro setting
instructions since otherwise you may make it im-
possible to fly your helicopter.
Programming
Similar to adjusting the
Pitch curve
, the control curve
for the tail rotor can also be defined with up to 7 points.
As needed, you can therefore modify the mixer at any
time and specify symmetrical and asymmetrical mixer
ratios above and below the hovering point.
Starting with -30% at point "L" and +30% at point
"H", adjust the mixer so that the helicopter does not
rotate about the vertical axis, even during long vertical
ascents and descents, as a result of differing main ro-
tor torque in comparison to hovering. While hovering,
only change the trim using the digital tail rotor trim
control:
In order to reliably adjust the torque compensation,
the pitch and throttle curves must be correctly adjust-
ed; in other words, the speed must remain constant
over the entire collective pitch adjustment range.
Autorotation setting
In normal flight, the tail rotor is adjusted so that it
compensates for the torque of the main rotor during
hovering. It therefore generates a certain amount of
thrust in home position. This thrust is then varied by
the tail rotor control and different mixers for all types
of torque compensation and is adjusted by trimming
the tail rotor to accommodate the weather, system
speed and other influences.
During autorotation however, the main rotor is not
driven by the motor but according to the windmill
principle. In this context, there is no torque that the
tail rotor must compensate. All of the corresponding
mixers are therefore automatically turned off.
Since the aforementioned thrust is no longer neces-
sary during autorotation because of the lack of torque,
the basic position of the tail rotor must also be differ-
ent:
While the motor is turned off, place the helicopter in
a horizontal position. Turn on the transmitter and re-
ceiver, select the phase "autorotation", fold down the
tail rotor blades, and change the mixer settings until
the pitch angle of the tail rotor blades equals 0°. The
tail rotor blades are then parallel with each other when
viewed from the rear.
178
Function menu | Helicopter model - Pitch >> Yaw
Summary of Contents for mz-24 PRO
Page 13: ...13 Personal notes...
Page 19: ...19 Personal notes...
Page 37: ...37 Personal notes...
Page 59: ...Touch 59 Base menu Model selection...
Page 79: ...79 Personal notes...
Page 89: ...89 Personal notes...
Page 115: ...115 Personal notes...
Page 153: ...Helicopter model function menus Common function menus 153 Personal notes...
Page 169: ...169 Personal notes...
Page 187: ...187 Personal notes...
Page 199: ...199 Personal notes...
Page 207: ...Fixed wing model function menus System menus 207 Personal notes...
Page 211: ...211 Personal notes...
Page 219: ...219 Personal notes...
Page 237: ...237 Personal notes...
Page 238: ...238 Personal notes...
Page 239: ...239 Personal notes...







































































