





























6.3 Fault Detection
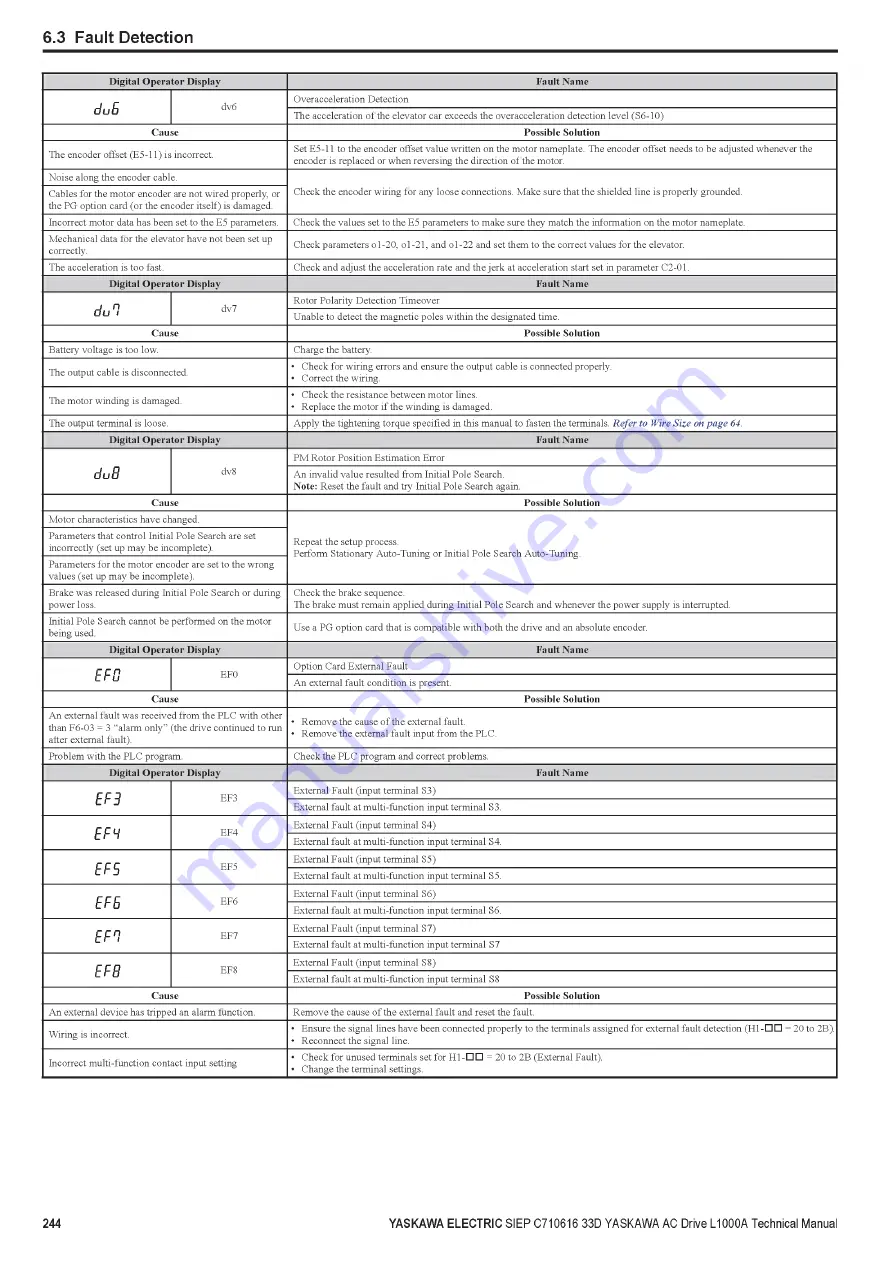
D i g i t a l O p e r a t o r D i s p l a y
F a u l t N a m e
duB
dv6
Overacceleration Detection
The acceleration of the elevator car exceeds the overacceleration detection level (S6-10)
C a u s e
P o s s i b l e S o l u t i o n
The encoder offset (E5-11) is incorrect.
Set E 5 -1 1 to the encoder offset value written on the motor nameplate. The encoder offset needs to be adjusted whenever the
encoder is replaced or w hen reversing the direction of the motor.
N oise along the encoder cable.
Check the encoder wiring for any loose connections. Make sure that the shielded line is properly grounded.
Cables for the motor encoder are not wired properly, or
the PG option card (or the encoder itself) is damaged.
Incorrect motor data has been set to the E5 parameters.
Check the values set to the E5 parameters to make sure they match the information on the motor nameplate.
M echanical data for the elevator have not been set up
correctly.
Check parameters o1-20, o1-21, and o1-22 and set them to the correct values for the elevator.
The acceleration is too fast.
Check and adjust the acceleration rate and the jerk at acceleration start set in parameter C2-01.
D i g i t a l O p e r a t o r D i s p l a y
F a u l t N a m e
d u n
dv7
Rotor Polarity Detection Timeover
Unable to detect the magnetic poles within the designated time.
C a u s e
P o s s i b l e S o l u t i o n
Battery voltage is too low.
Charge the battery.
The output cable is disconnected.
• Check for wiring errors and ensure the output cable is connected properly.
• Correct the wiring.
The motor winding is damaged.
• Check the resistance betw een motor lines.
• Replace the motor if the winding is damaged.
The output terminal is loose.
Apply the tightening torque specified in this manual to fasten the terminals. R efer to W ire S iz e on p a g e 64.
D i g i t a l O p e r a t o r D i s p l a y
F a u l t N a m e
duB
dv8
PM Rotor Position Estimation Error
A n invalid value resulted from Initial Pole Search.
N o t e :
Reset the fault and try Initial Pole Search again.
C a u s e
P o s s i b l e S o l u t i o n
Motor characteristics have changed.
Repeat the setup process.
Perform Stationary Auto-Tuning or Initial Pole Search Auto-Tuning.
Parameters that control Initial Pole Search are set
incorrectly (set up may be incomplete).
Parameters for the motor encoder are set to the wrong
values (set up may be incomplete).
Brake was released during Initial Pole Search or during
power loss.
Check the brake sequence.
The brake must remain applied during Initial Pole Search and whenever the power supply is interrupted.
Initial Pole Search cannot be performed on the motor
being used.
U se a PG option card that is compatible with both the drive and an absolute encoder.
D i g i t a l O p e r a t o r D i s p l a y
F a u l t N a m e
EFQ
EF0
Option Card External Fault
A n external fault condition is present.
C a u s e
P o s s i b l e S o l u t i o n
A n external fault was received from the PLC with other
than F6-03 = 3 “alarm only” (the drive continued to run
after external fault).
• R em ove the cause o f the external fault.
• R em ove the external fault input from the PLC.
Problem with the PLC program.
Check the PLC program and correct problems.
D i g i t a l O p e r a t o r D i s p l a y
F a u l t N a m e
EF3
EF3
External Fault (input terminal S3)
External fault at multi-function input terminal S3.
EF4
EF4
External Fault (input terminal S4)
External fault at multi-function input terminal S4.
EF5
EF5
External Fault (input terminal S5)
External fault at multi-function input terminal S5.
EFB
EF6
External Fault (input terminal S6)
External fault at multi-function input terminal S6.
ЕЕП
EF7
External Fault (input terminal S7)
External fault at multi-function input terminal S7
EFB
EF8
External Fault (input terminal S8)
External fault at multi-function input terminal S8
C a u s e
P o s s i b l e S o l u t i o n
A n external device has tripped an alarm function.
R em ove the cause o f the external fault and reset the fault.
Wiring is incorrect.
• Ensure the signal lines have been connected properly to the terminals assigned for external fault detection (Ш -П П = 20 to 2B).
• Reconnect the signal line.
Incorrect multi-function contact input setting
• Check for unused terminals set for Ш - П П = 20 to 2B (External Fault).
• Change the terminal settings.
244
YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual