





























3
Commissioning
3.8
Commissioning of the "Table positioning" technology application
78
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
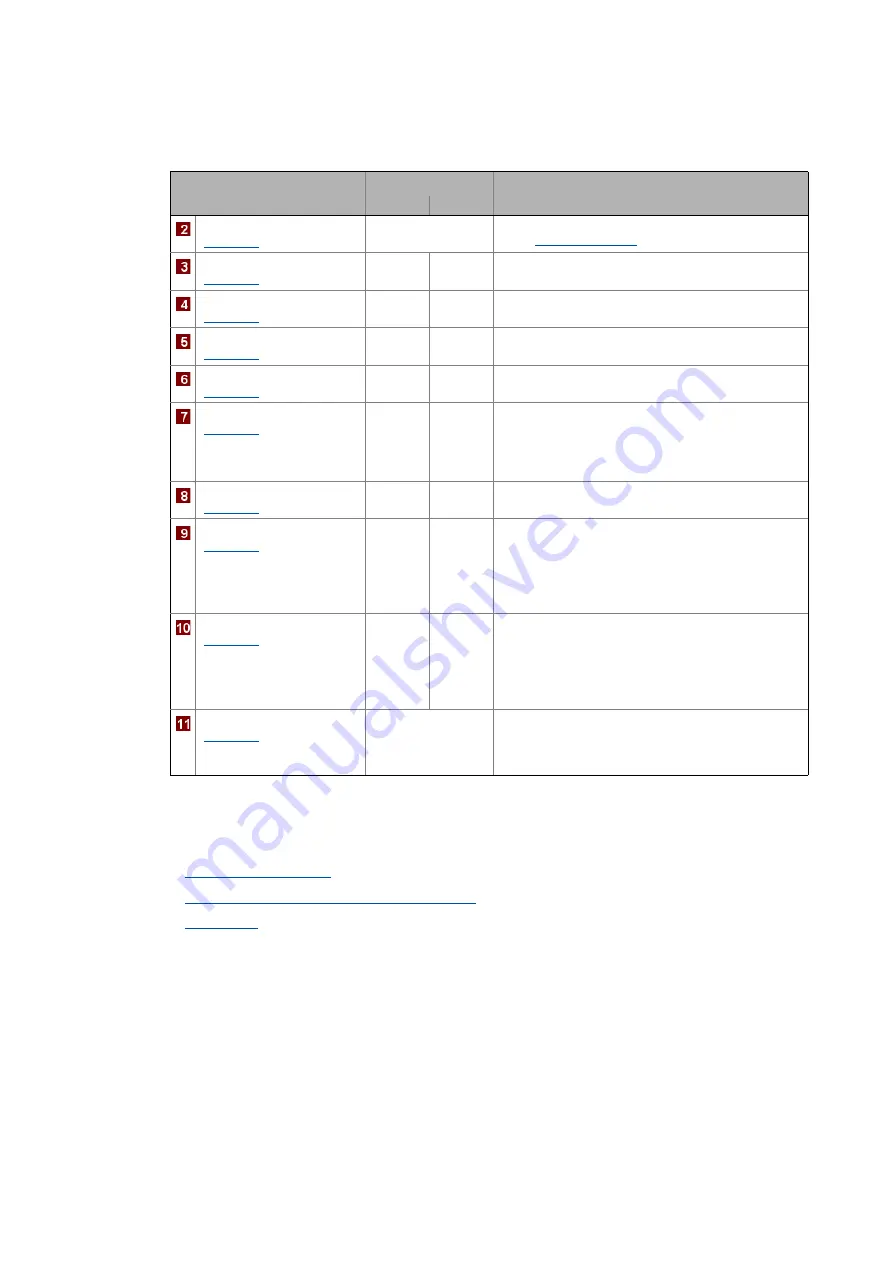
3. Set the profile parameters:
4. After entering the profile, click the
Back
button to change back to the
Overview
Signal flow
dialog level.
Related topics:
Operating mode change with profile number
Parameters
Lenze setting
Info
Value Unit
Profile x: Mode
(
absolute
(shortest way)t
Selection of the way in which positioning is to be carried
out.
Profile x: Position
(
360.0000 unit
Target position or distance to be traversed.
Profile x: Speed
(
360.0000 unit/s
Maximum velocity at which the target is to be
approached.
Profile x: Acceleration
(
720.0000 unit/s
2
Specification of the maximum velocity variation which
is to be used for acceleration.
Profile x: Deceleration
(
720.0000 unit/s
2
Specification of the velocity variation which is to be
used for maximum deceleration to standstill.
Profile x: S-ramp time
(
0.000 s
Due to stipulation of an S-ramp time for a profile, the
profile is executed with S-shaped ramps, i.e.
acceleration and braking processes are initiated
smoothly in order to reduce jerk and thus the stress on
the drive components.
Profile x: Final speed
(
0.0000 unit/s
This specifies the velocity at which the drive is to start
the next profile after reaching the target position.
Profile x: Sequence profile
(
0
Optional: Sequence profile for profile linkage /
following block control.
After execution of the profile (target position reached),
the set following (subsequent) profile is started
automatically. In this way, profile chains can be
stipulated without additional control processes.
Profile x: TP profile
(
0
Optional: Profile number of the profile (1 … 15) that is to
be executed after a touch probe has been detected.
• If "0" is set, there will be no profile stepping through
touch probe.
• Only relevant for positioning modes with touch-
probe.
Profile x: TP source
(
TP-DigIn3
Optional: Selection of the signal source for touch probe
detection.
• Only relevant for positioning modes with touch-
probe.