





























Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
295
5
Motor control (MCTRL)
5.13
Braking operation/brake energy management
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Functional principle
One of the inverters of the DC-bus system is assigned the role of the "brake chopper master".
• For logical reasons, the "brake chopper master" should be the most powerful inverter.
• The "brake chopper master" controls its internal brake chopper via the DC-bus voltage as before.
In addition, the "brake chopper master" transmits the
bBrakeChopperActive
status signal of its
internal brake chopper control to the other inverters of the DC-bus system via fieldbus or digital
output.
All the other inverters of the DC-bus system are "brake chopper slaves".
• The "brake chopper slaves" have the
bBrakeChopperActive
status signal received from the "brake
chopper master" connected to the
bBrakeChopperOn
control input.
• If the internal brake transistor of the "brake chopper master" is switched on, the internal brake
transistors of the "brake chopper slaves" are switched on at the same time.
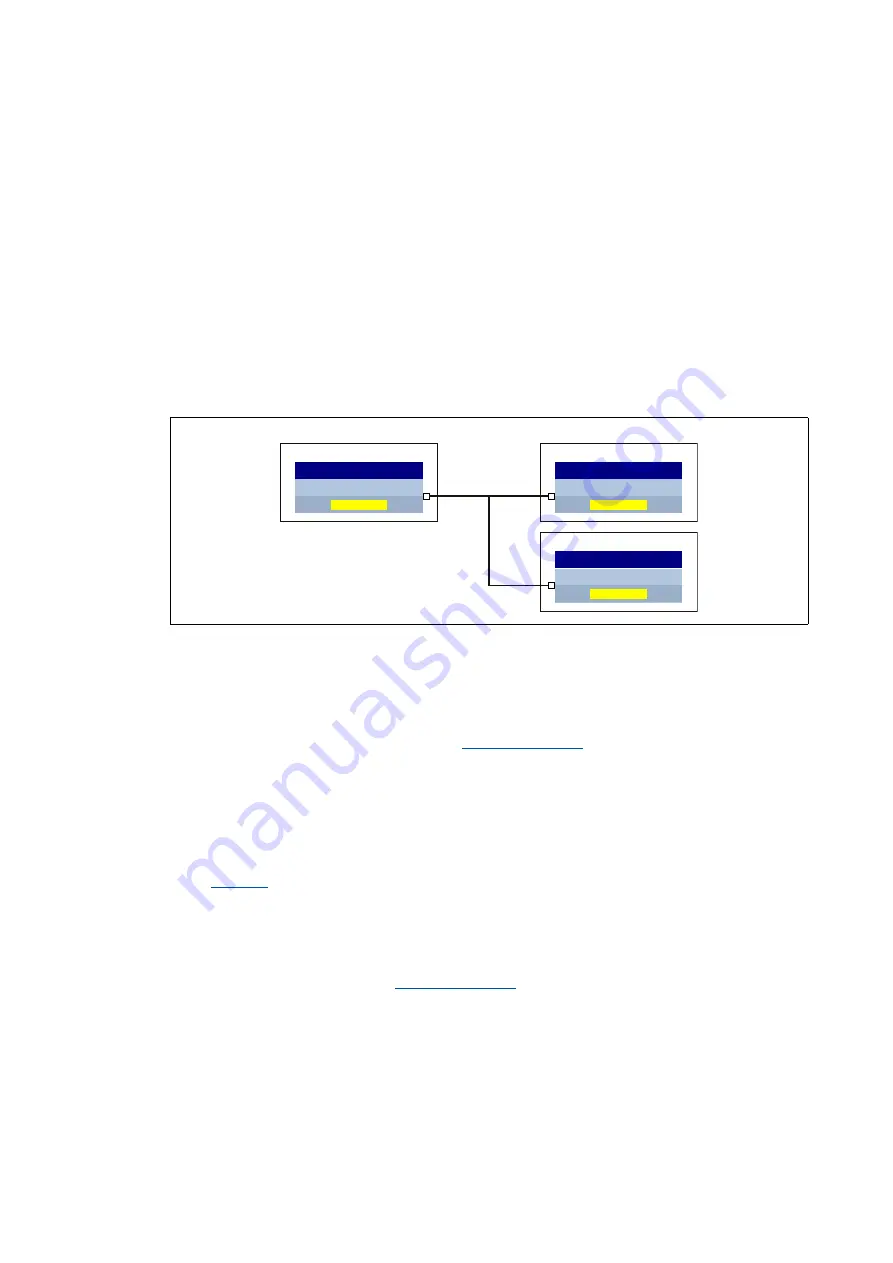
[5-33] Functional principle of the "Brake chopper master-slave operation" (simplified representation)
Procedure
1. Assign the role of the "brake chopper master" to one of the inverters of the DC-bus system.
2. Adapt the function block interconnection for the "brake chopper master" so that the
bBrakeChopperActive
status signal of the
SB is provided to the other
inverters for controlling the internal brake chopper.
• The
bBrakeChopperActive
signal can e.g. be output via port block to the fieldbus or via digital
output.
• A free output of the application block can be used to transfer the signal from application level
to I/O level.
3. Configure all the other inverters of the DC-bus system as "brake chopper slaves". Select "1: Yes"
for these inverters.
• With this setting, the brake chopper is not controlled via the DC-bus voltage anymore. Its
control now depends on the
bBrakeChopperOn
control signal.
4. Adapt the function block interconnection for the "brake chopper slaves" so that the
bBrakeChopperActive
signal received from the "brake chopper master" is connected to the
bBrakeChopperOn
input of the
SB.
• Depending on the output at the "brake chopper master", the signal must be read in e.g. via
port block or digital input.
• A free input of the application block can be used to transfer the signal from I/O level to
application level.
• If the digital inputs/outputs are used for transmitting the signal, they must be connected
electrically accordingly.
%UDNHFKRSSHUPDVWHU
E%UDNH&KRSSHU$FWLYH
/6B0RWRU,QWHUIDFH
E%UDNH&KRSSHU2Q
/6B0RWRU,QWHUIDFH
&
&
%UDNHFKRSSHUVODYHV
E%UDNH&KRSSHU2Q
/6B0RWRU,QWHUIDFH
&