





























Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
459
7
Technology applications
7.4
TA "Table positioning"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
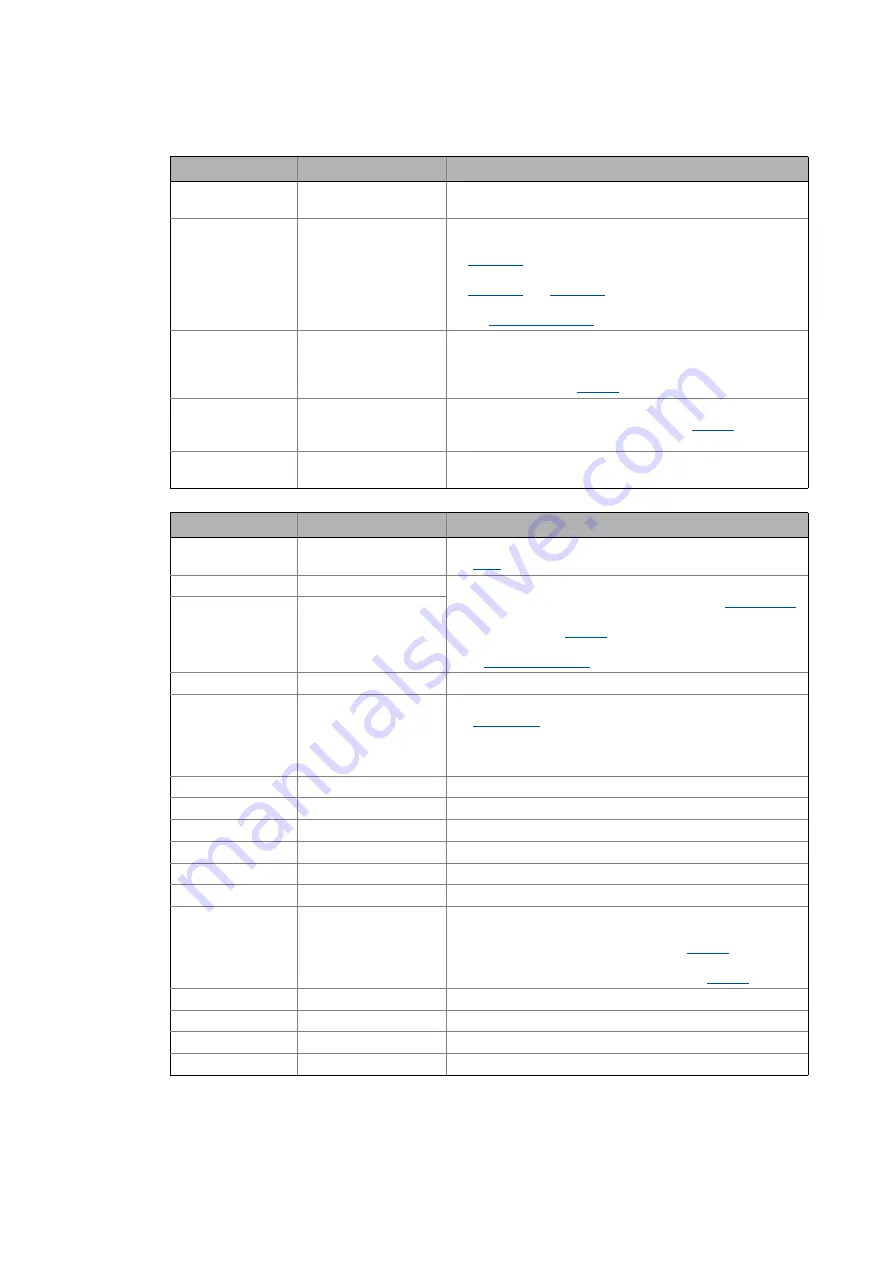
Output words
Name
Assignment
Word 1 DriveControlStatus
Status word
• For bit assignment see the table below.
Word 2 GPSignalOut1
Analog signal monitor: Output signal 1
• The selection of the signal source to output is executed in
• Gain and offset for the output signal can be parameterised in
and
• For a detailed functional description see
the
FB.
Word 3 and 4 SetPos
Absolute position setpoint in [increments]
• 65535 [Increments]
≡
1 motor revolution
• The position resolution, i.e. how many increments form one
unit, is displayed in
.
Word 5 MotorSpeedAct
Actual speed value
• Scaling: 16384
≡
100 % reference speed (
)
• Only available in control mode "40: MCI".
Word 6 ... 16 -
Not preconfigured
• Only available in control mode "40: MCI".
Status word
Name
Status
Bit 0 DriveFail
1
≡
Inverter in the error status
• "
" device status is active.
Bit 1 GPSignalOut1
Binary signal monitor: Output signals 1 & 2
• The signal sources to be output are selected in
• A bit coded inversion of the output signals can be
parameterised in
.
• For a detailed functional description see
FB
Bit 2 GPSignalOut2
Bit 3 CInhActive
1
≡
Controller inhibit is active
Bit 4 DriveReady
1
≡
Inverter is ready for operation
• "
" device status is active.
• The drive is in this device status if the DC bus voltage is
applied and the inverter is still inhibited by the user
(controller inhibit).
Bit 5 DigitalInput5
Signal from the digital input DI5
Bit 6 DigitalInput6
Signal from the digital input DI6
Bit 7 DigitalInput7
Signal from the digital input DI7
Bit 8 InTarget
1
≡
Target position (actual value) is in the target window
Bit 9 ProfileBusy
1
≡
Profile positioning is active
Bit 10 HomePosAvailable
1
≡
Home position is known
Bit 11 SpeedActCompare
Result of the speed comparison (detection of speed=0)
• In case of the "Open loop" operation:
1
≡
Speed setpoint < comparison value (
)
• For "Closed loop" operation:
1
≡
actual speed value < comparison value (
)
Bit 12 DigitalInput4
Signal from the digital input DI4
Bit 13 DigitalInput3
Signal from the digital input DI3
Bit 14 QSPIsActive
1
≡
Quick stop is active
Bit 15 -
Free status bit 15 (not assigned, freely assignable)