





























4-14
Pr0.12
*
Reversal of pulse output logic
Range
Unit
Default
Related
control mode
0 to 3
—
0
P S T F
Caution
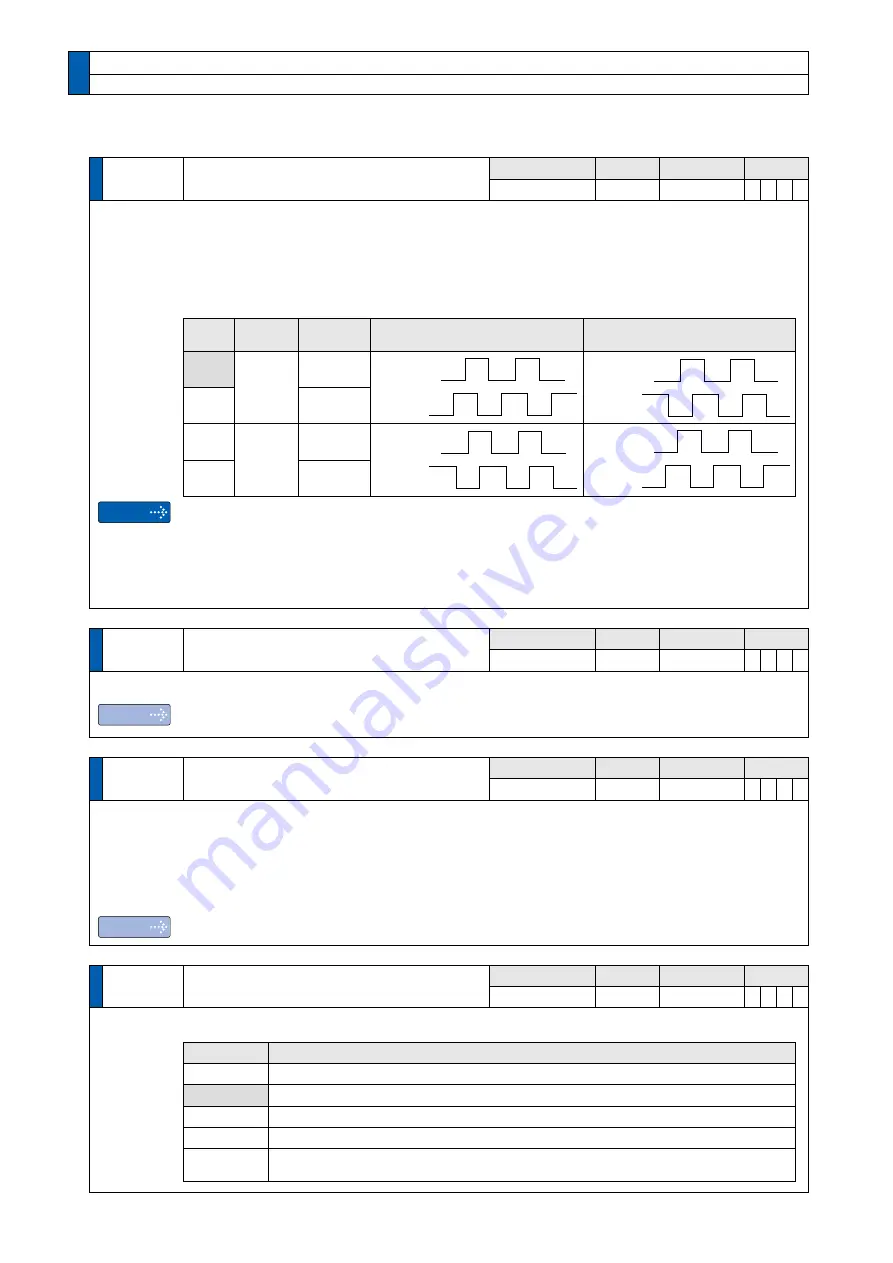
You can set up the B-phase logic and the output source of the pulse output. With this
parameter, you can reverse the phase relation between the A-phase pulse and the B-phase
pulse by reversing the B-phase logic. Encoder or external scale can be selected as the output
source for full-closed control. The encoder is selected as the source if not for full-closed control.
<Reversal of pulse output logic>
Pr0.12 B-phase
logic
Output
source
CCW direction
rotation
CW direction
rotation
[0]
Non-
reversal
Encoder
A-phase
B-phase
A-phase
B-phase
2
External
scale
1
Reversal
Encoder
A-phase
B-phase
A-phase
B-phase
3
External
scale
Setup value 2 and 3 are valid only for full-closed control. Setting must be 0 or 1 if not for full-
closed control.
The selection of the output source of Z-phase is held concurrently.
Setup value 0 and 1 are Z-phase output of encoder.
Setup value 2 and 3 are Z-phase output of external scale.
Pr0.13
1st torque limit
Range
Unit
Default
Related
control mode
0 to 500
%
500
P S T F
Note
You can set up the limit value of the motor output torque.
For details of torque limit value, refer to P.2-84.
Pr0.14
Position deviation excess setup
Range
Unit
Default
Related
control mode
0 to 1073741824
Command
unit
100000
P
F
Note
• Set excess range of positional deviation by the command unit (default).
• Setup unit can be changed to encoder unit through Pr5.20 (position setup unit selection).
If the unit is changed, set up with the encoder pulse counts at the position control and with
the external scale pulse counts at the full-closed control.
• Err24.0 (Error detection of position deviation excess) becomes invalid when you set up this to 0.
For description of “command unit” and “encoder unit”, refer to P.4-58 “Pr5.20”.
Pr0.15
*
Absolute encoder setup
Range
Unit
Default
Related
control mode
0 to 2
—
1
P S T F
You can set up the using method of 23-bit absolute encoder.
Setup value
Function
0
Used as absolute system .
[1]
Used as incremental system .
2
Used as absolute system (absolute mode), but multirotation counter over is ignored.
3
Used as a single-turn absolute mode.
4
Used as an absolute system(absolute mode);however,any value can be set for the
upper limit of the multi-turn counter.(continuous rotating absolute encoder mode)
1. Details of parameter
[Class 0] Basic setting
Default: [ ]
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]







































































