





























3-5
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in T
rouble
7
Supplement
1. Outline of mode
Position Control Mode
(6) Positioning complete output (INP) function
The completion of positioning can be verified by the positioning complete output (INP).
When the absolute value of the positional deviation counter at the position control is
equal to or below the positioning complete range by the parameter, the output is ON.
Presence and absence of positional command can be specified as one of judgment
conditions.
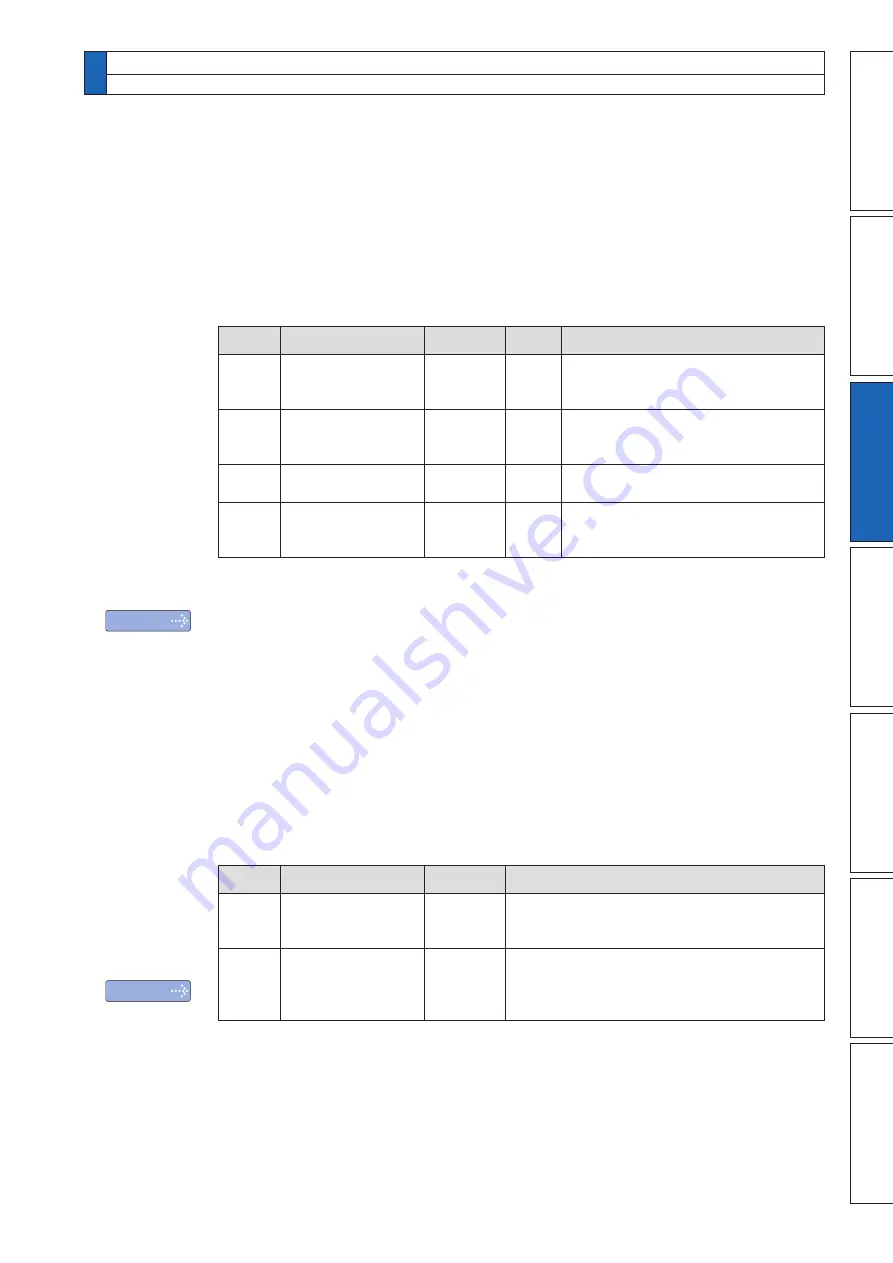
• Relevant parameters
Parameter
No.
Title
Range
Unit
Function
Pr4.31 Positioning complete
(In-position) range
0 to
2097152
Command
unit
Set up the timing of positional deviation
at which the positioning complete signal
(INP1) is output.
Pr4.32
Positioning complete
(In-position) output
setup
0 to 10
—
Select the condition to output the
positioning complete signal (INP1).
Pr4.33 INP hold time
0 to 30000
1 ms
Set up the hold time when Pr4.32
Positioning complete output setup = 3.
Pr4.42
2nd Positioning
complete (In-position)
range
0 to
2097152
Command
unit
Set up the timing of positional deviation
at which the positioning complete signal
(INP2) is output.
For details of these parameters, refer to
P.4-6 to P.4-85
“Details of parameter”.
Note
(7) Command pulse inhibition (INH) function
The command pulse input counting process can be forcibly terminated by using the
command pulse inhibit input signal (INH). When INH input is ON, the servo driver ig
-
nores the command pulse, disabling pulse counting function. At then, A large number
of pulses of the positional command filter function and the command frequency muliti
-
plication function is cleared.
The default setting of this inhibition function is disable. To use INH function, change the
setting of Pr5.18 “Invalidation of command pulse prohibition input”.
• Relevant parameters
Parameter
No.
Title
Range
Function
Pr5.18
Invalidation of
command pulse inhibit
input
0 to 1
Select command pulse inhibit input enable/disable.
Pr5.19 Command pulse inhibit
input reading setup
0 to 5
Select command pulse inhibit input enable/disable
signal reading period. When the status of several
signals read during the predetermined reading
period are same, update the signal status.
For details of these parameters, refer to
P.4-6 to P.4-85
“Details of parameter”.
When INH input is ON, the deviation will be caused between the
positional command
administrated by controller and internal positional command
from the fliter that receives the
positional command from servo drivers, and orginal
location before being input INH posi-
tional command
will be lost. Therefore, it is supposed to reset the orignial location when it
needs to restart return to origin action.
Note
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]







































































