





























Protective
function
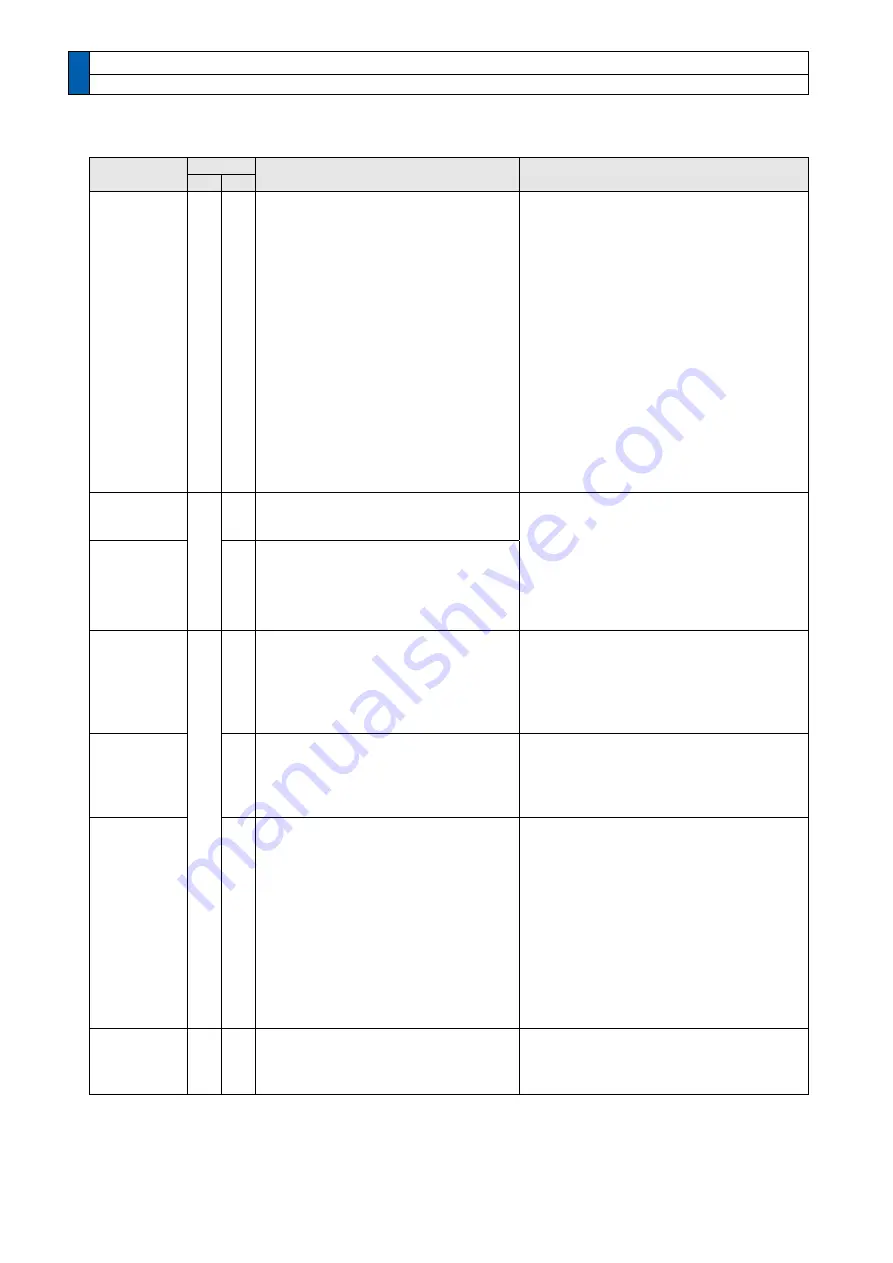
Error code No.
Causes
Measures
Main Sub
6-8
1. When in Trouble
Protective function (Detail of error code)
*
Hybrid
deviation
excess error
protection
25
0
• Position of load by the external scale
and position of the motor by the
encoder slips larger than the setup
pulses with Pr3.28 (Setup of hybrid
deviation excess) at full-closed control.
• During full closed control, numerator
of command division/multiplication is
changed or switched over.
• Check the connection between the motor
and the load.
• Check the connection between the external
scale and the driver.
• Check that the variation of the motor
position (encoder feedback value) and
the load position (external scale feedback
value) is the same sign when you move the
load.
• Check that the numerator and denominator
of the external scale division (Pr3.24 and
3.25) and reversal of external scale direction
(Pr3.26) are correctly set.
• Do not change command division/
multiplication during full closed control.
Over-speed
protection
26
0
The motor rotational speed has exceeded
the setup value of Pr5.13.
• Do not give an excessive speed command.
• Check the command pulse input frequency
and division/multiplication ratio.
• Make a gain adjustment when an overshoot
has occurred due to a poor gain adjustment.
• Make a wiring connection of the encoder as
per the wiring diagram.
2nd Over-
speed
protection
1
The motor rotational speed has exceeded
the setup value of Pr6.15.
Command
pulse input
frequency
error
protection
27
0
The frequency of command pulse input is
more than 1.2 times the setting in Pr5.32.
Check the command pulse input for
frequency.
Absolute
clear
abnormal
protection
1
Absolute encode multi-rotation clear has
been executed when a block operation
was enabled (Pr 6.28 is non 0).
Confirm whether absolute encode multi-
rotation clear has when a block operation
was enabled.(Note) This is a safety measure
and is not an abnormality.
Command
pulse
multiplier
error
protection
2
Division and multiplication ratio which are
set up with the command pulse counts
per single turn and the1st and the 4th
numerator/denominator of the electronic
gear are not appropriate.
The command pulses per 0.167 ms
multiplied by the command division and
multiplication ratio exceeds 3000 Mpps.
The command pulse input fluctuates.
Noises mixed with the command pulse
input cause counting error.
• Set the command division and multiplication
ratio to a value as small as possible e.g.
between 1/1000 and 1000.
• Check the setup value of electronic gear.
• If possible, use the line driver I/F.
• Set Pr5.32 (setting of max. command pulse
input) to a value less than 1000 and enable
digital filter.
Limit of
pulse replay
protection
28
0
The output frequency of pulse
regeneration has exceeded the limit.
• Check the setup values of Pr0.11 and 5.03.
• To disable the detection, set Pr5.33 to 0.
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]







































































