





























4-19
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in T
rouble
7
Supplement
Note
Related page
• A parameter is designated as follows:
Pr0.00 Parameter No.
Class
• For parameters which No. have a suffix of “
*
”
, changed contents will be validated
when you turn on the control power.
• P.3-32... “Inputs and outputs on connector X4”
Default: [ ]
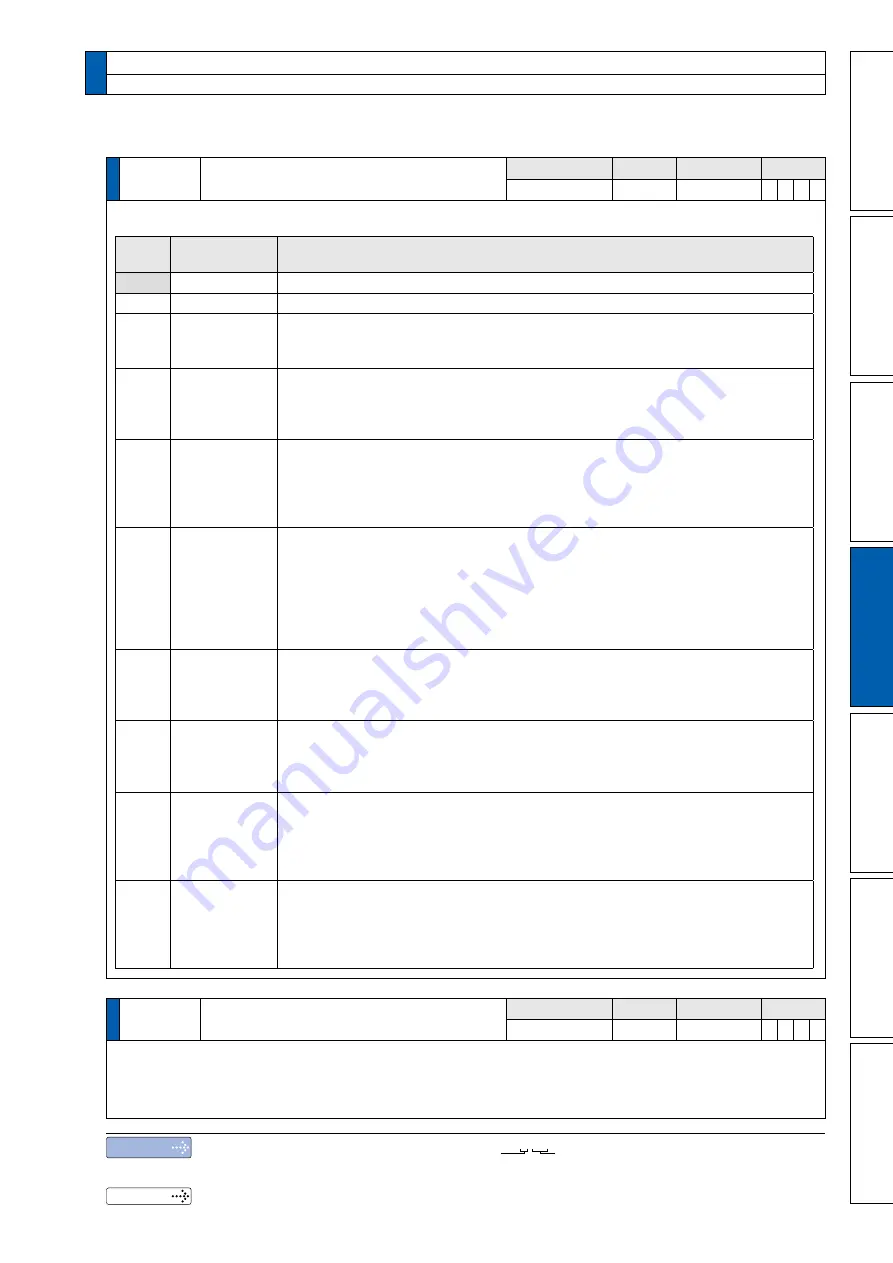
Pr1.15
Mode of position control switching
Range
Unit
Default
Related
control mode
0 to 10
—
0
P
F
Setup
value
Switching
condition
Gain switching condition
[0]
Fixed to 1st gain
Fixed to the 1st gain (Pr1.00 to Pr1.04).
1
Fixed to 2nd gain
Fixed to the 2nd gain (Pr1.05 to Pr1.09).
2
With gain
switching input
• 1st gain when the gain switching input (GAIN) is open.
• 2nd gain when the gain switching input (GAIN) is connected to COM-.
*
If no input signal is allocated to the gain switching input (GAIN), the 1st gain is fixed.
3
Torque
command is
large
• Shift to the 2nd gain when the absolute value of the torque command exceeded (level +
hysteresis) (%) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the torque command was kept below (level
- hysteresis) (%) previously during delay time with the 2nd gain.
5
Speed
command is
large
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the absolute value of the speed command exceeded (level +
hysteresis) (r/min) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the speed command was kept below (level
- hysteresis) (r/min) previously during delay time with the 2nd gain.
6
Position
deviation is
large
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the absolute value of the positional deviation exceeded (level +
hysteresis) (pulse) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the positional deviation was kept below
(level - hysteresis) (pulse) previously over delay time with the 2nd gain.
*
Unit of level and hysteresis (pulse) is set as the encoder resolution for positional control
and external scale resolution for full-closed control.
7
Position
command
exists
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the positional command was not 0 previously with the 1st gain.
• Return to the 1st gain when the positional command was kept 0 previously during delay
time with the 2nd gain.
8
Not in
positioning
complete
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the positioning was not completed previously with the 1st gain.
• Return to the 1st gain when the positioning was kept in completed condition previously
during delay time with the 2nd gain.
9
Actual speed is
large
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the absolute value of the actual speed exceeded (level +
hysteresis) (r/min) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the actual speed was kept below (level -
hysteresis) (r/min) previously during delay time with the 2nd gain.
10
Position
command
Actual speed
• Valid for position and full-closed controls.
• Shift to the 2nd gain when the positional command was not 0 previously with the 1st gain.
• Return to the 1st gain when the positional command was kept at 0 during the delay
time and the absolute value of actual speed was kept below (level - hysteresis ) (r/min)
previously with the 2nd gain.
Set up the triggering condition of gain switching for position control.
Pr1.16
Delay time of position control switching
Range
Unit
Default
Related
control mode
0 to 10000
0.1 ms
10
P
F
For position controlling : When shifting from the 2nd gain to the 1st gain with Pr1.15 Position
control switching mode set at 3, 5, 6, 7, 8, 9 or 10, set up the delay time from trigger
detection to the switching operation.
1. Details of parameter
[Class 1] Gain adjustment
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]







































































