





























3-15
1
Before Using the Products
2
Preparation
3
Connection
4
Setup
5
Adjustment
6
When in T
rouble
7
Supplement
3
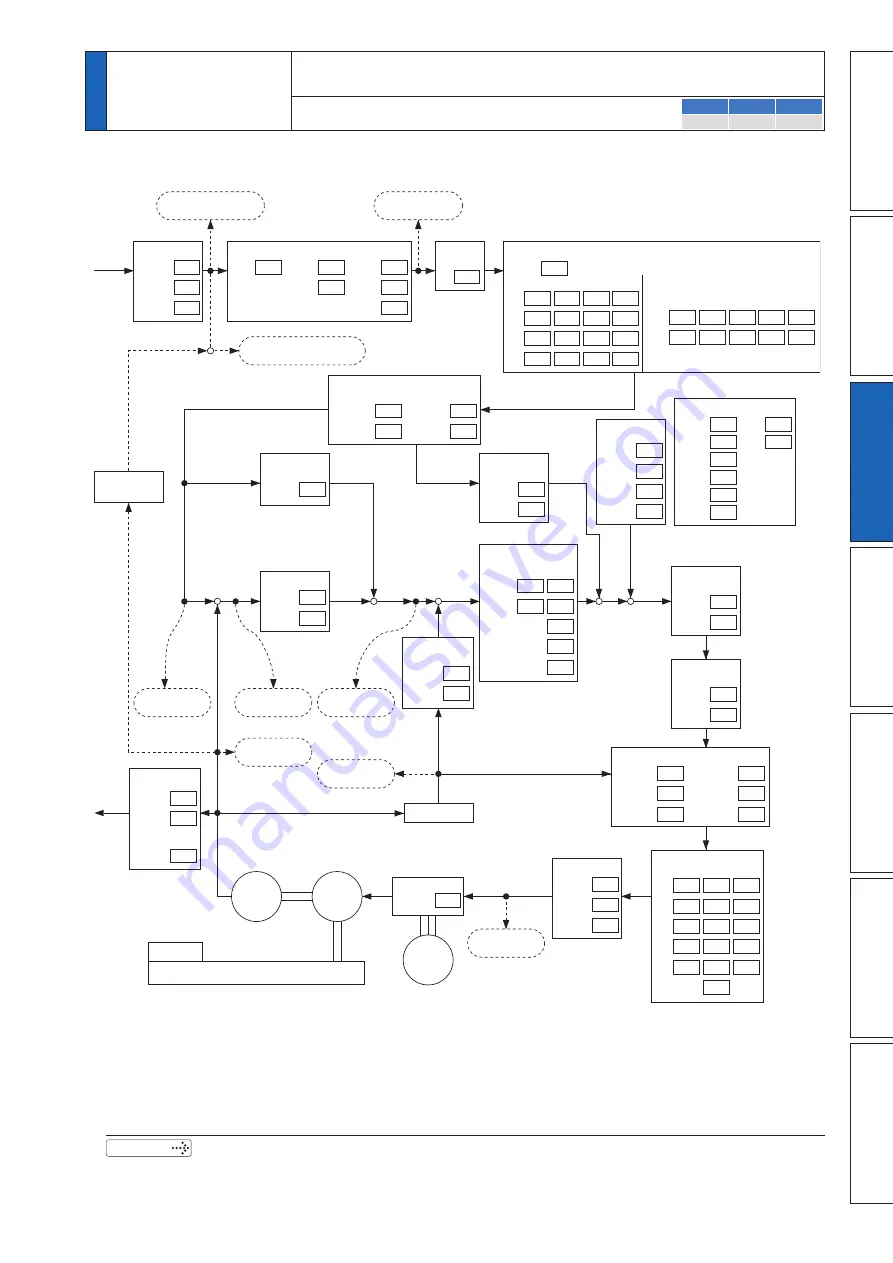
2. Control Block Diagram
Connection
Position Control Mode
(Two-degree-of-freedom control effective)
Pulse train
PULS
SIGN
Input setup
Sum of command pulses
[Command unit]
0.05
Input
selection
0.06
Direction
setup
0.07
Mode
Notch filter
2.01
1st
Frequency Depth
2.04
2.02
2.05
2nd
2.10 2.11
2.00
Width
2.03
2.06
2.07 2.08
3rd
2.09
2.12
4th
2.24 2.25 2.26
5th
Adaptive
mode setup
Velocity control
1.01
1st
Propor-
tion
Integra-
tion
1.06
1.02
1.07
2nd
0.04
6.10
Inertia ratio
Function
expansion
6.13
2nd inertia ratio
Damping control
2.14
1st
Model
1st
Model
2nd
2.13
Switching
selection
Frequency
Resonance
Frequency
Response
Frequency
Antiresonance
F equency
Resonance
Damping
Ratio
Antiresonance
Damping
Ratio
Filter
2.16
2.18
2.20
2.15
2.17
2nd
2.19
2.21
Depth
6.41
6.60
6.71
6.72
Width
2.27
2.28
2.29
2.30
3rd
4th
Smoothing
filter
Electric gear
0.08
One
revolu-
tion
0.09
1st
numerator
0.10
Denominator
Gain switching
1.14
2nd
setup
1.15
Mode
1.16
Delay
time
1.17
Level
1.18
Hysteresis
1.19
Switching
time
6.05
3rd
setup
6.06
Scale
factor
5.00
2nd
numerator
5.01
3rd
numerator
FIR
2.23
Motor
Load
Main
power
supply
Encoder
Velocity
feed forward
1.10
Gain
Torque
feed forward
1.12
Gain
1.13
Filter
Position control
1.00
1st
1.05
2nd
Current control
Speed detection
Torque filter
1.04
1st
1.09
2nd
Speed detection
filter
1.03
1st
1.08
2nd
Torque limit
5.21
Selection
0.13
1st
5.22
2nd
Pulse
regeneration
Pulses
output
OA
OB
OZ
Numerator/
Denominator
0.11
One
revolution
0.12
Reversal
5.03
Denomi-
nator
5.02
4th
numerator
Command positional deviation
[Command unit]
Encoder
positional deviation
[Encoder pulse]
velocity control
command [r/min]
Two-stage
torque filter
6.42
Time
constant
6.43
Damping
term
Torque command
[%]
+
-
+
-
+
+
+
+
+
+
+
-
Internal position
command speed
[r/min]
Sum of
feedback pulses
[Encoder pulse]
Motor speed
[r/min]
Inversion of
electric gear
Friction
compensation
6.07
6.08
6.09
Additional
value
Positive
direction
Negative
direction
6.50
Gain
Positional command
speed [r/min]
Adjust filter
6.48
Time
constant
6.49
Time
constant
Command
response filter
2.22
6.49
6.61
6.62
6.63
6.64
6.65
6.66
6.67
6.68
6.69
6.70
6.11
Response
setup
Load fluctuant restrain function
6.23
Compens-
ation gain
6.24
Compens-
ation filter
6.73
Designate
filter
6.74
1st frequence
6.75
2nd frequence
6.76
Times
Damping
term
Damping
term
• P.3-21 “Wiring example of position control mode”
• P.3-23 “Connecting example to host controller”
• P.3-33 “Inputs and outputs on connector X4” • P.4-2 “List of Parameters”
SE
SG
SF
○
○
○
Related page
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]







































































