





























4-170
4-171
Chapter
4
OPERA
TION
12. "SYSTEM" mode
6. Out position [pulse] /OUTPOS
During PTP movement in a program, the next command can be executed when the
robot enters the range specified by the Out position for the target position. This
parameter sets the Out position range. When initialized, this is set to a value unique
to each axis.
When the robot enters the Out position range, the controller determines that the
program line has been executed. (However, the robot continues moving to the target
position.) When consecutive PTP movement commands are in a program, the larger
the value that is set, the more the time required to shift to the next command line can
be shortened.
The robot is verified to have entered the tolerance range before executing the
movement command so the previous positioning operation will end, even when
executing consecutive PTP operations.
The value set for the selected axis is displayed in converted units on the 3rd line of
the RPB screen.
c
CAUTION
When the tolerance range is larger than the Out position range, the PTP
operation is performed until the robot is within the Out position range.
■
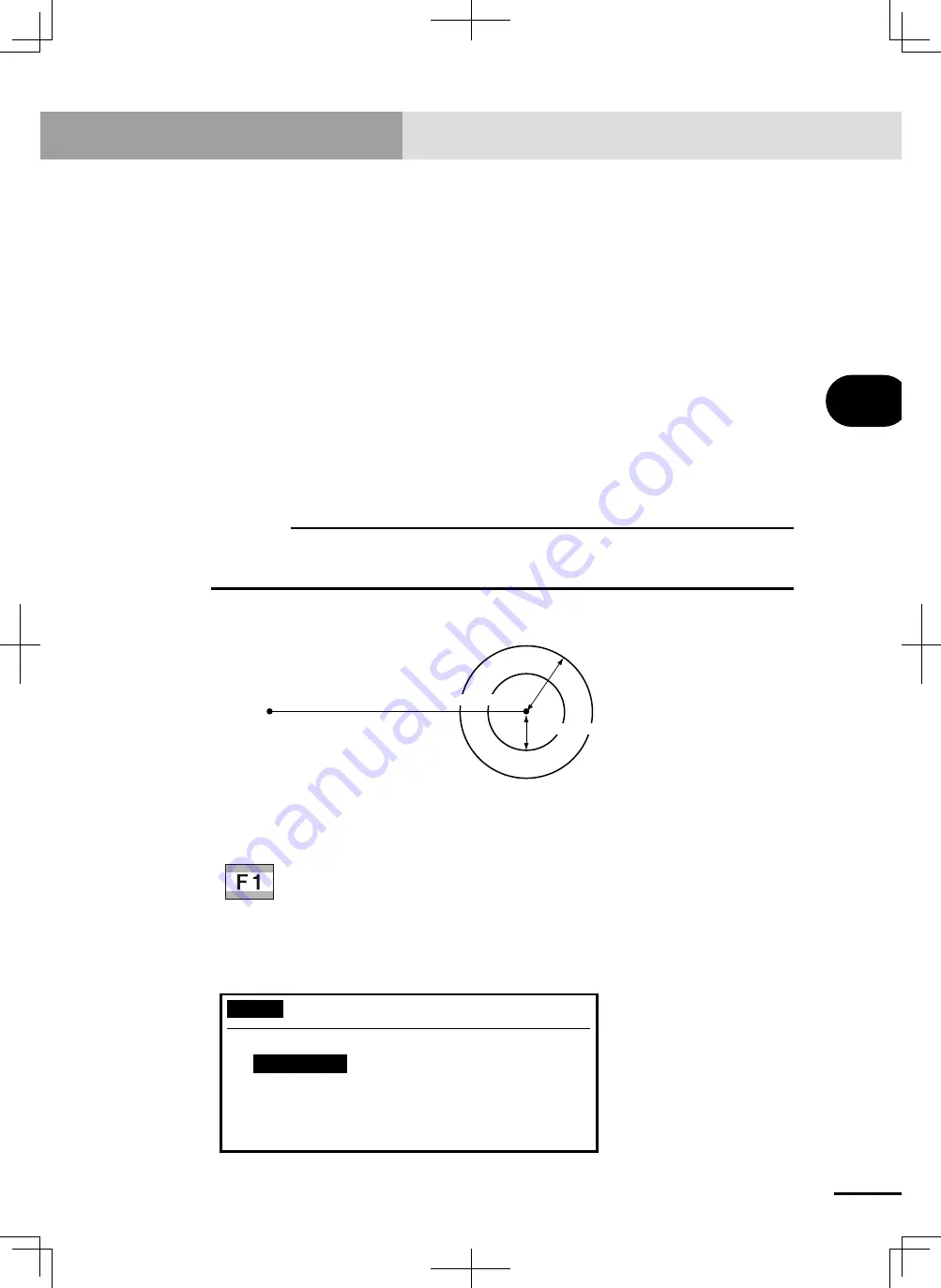
OUT position range
Current position
Out position
range
Target position
Tolerance range
[Procedure]
1) Select "6. Out position [pulse]" in "SYSTEM>PARAM>AXIS" mode.
2) Press
(EDIT).
3) Select the axis with cursor (
↑
/
↓
) keys.
■
Setting the "Out position [pulse]"
SYSTEM
>PARAM>AXIS V9.00
6.Out position[pulse]
(
0. 56mm)
M1=
2000
M2=
2000
[1-6144000] Enter >_
2000
Summary of Contents for RCX222
Page 1: ...RCX222 EUR2153130 E99 Ver 1 30 Userʼs Manual YAMAHA 2 AXIS ROBOT CONTROLLER ...
Page 2: ......
Page 14: ......
Page 43: ......
Page 46: ......
Page 50: ...4 MEMO ...
Page 51: ...Chapter 1 USING THE ROBOT SAFELY Contents 1 Operating environment 1 1 ...
Page 52: ......
Page 56: ......
Page 98: ......
Page 388: ......
Page 412: ...5 24 MEMO ...
Page 414: ......
Page 430: ......
Page 442: ......
Page 450: ...8 8 MEMO ...
Page 452: ......
Page 523: ......