





























8.1
Basic Operation
8-11
Operation of input control/output control signals
•
When a positioning start request (corresponding bit allocated to UM00192 to UM00197)
turns on by a user program, the positioning control will start. The positioning start request will
be enabled at the edge where it turns on.
•
A busy flag (corresponding bit allocated to UM00090 to UM00095), which indicates that a
requested operation is being controlled, will turn on when the positioning control starts, and it
will turn off when the operation completes.
•
An operation done flag (corresponding bit allocated to UM00096 to UM0009B), which
indicates the completion of operation, will turn on when the current operation is completed,
and it will be held until the next positioning control, JOG operation, or home return starts.
•
When a J-point speed change request (corresponding bit allocated to UM001BC to
UM001C1) turns on, the target speed will change. The speed change request will be
enabled at the edge where it turns on.
•
When a J-point positioning start request (corresponding bit allocated to UM001C2 to
UM001C7) turns on, the next positioning control will start.
Allocation of unit memories
Signal name
Real axis
Virtual axis
Axes
1-16
Axes
17-32
Axes
33-48
Axes
49-64
Axes
1-16
Axes
17-32
Positioning start request
UM00192
UM00193
UM00194
UM00195
UM00196
UM00197
BUSY flag
UM00090
UM00091
UM00092
UM00093
UM00094
UM00095
Operation done flag
UM00096
UM00097
UM00098
UM00099
UM0009A
UM0009B
J-point speed change request
UM001BC
UM001BD
UM001BE
UM001BF
UM001C0
UM001C1
J-point positioning start
request
UM001C2
UM001C3
UM001C4
UM001C5
UM001C6
UM001C7
(Note 1): Flags or request signals for 16 axes are allocated to each unit memory (1 word) in the above table. When
the value of each bit is 1, it turns on. When the value of each bit is 0, it turns off.
bit no. 15
0
8 7
9
1
8
16
● ● ● ● ● ●
● ● ● ● ● ●
Axis no.
25
17
24
32
● ● ● ● ● ●
● ● ● ● ● ●
41
33
40
48
● ● ● ● ● ●
● ● ● ● ● ●
57
49
56
64
● ● ● ● ● ●
● ● ● ● ● ●
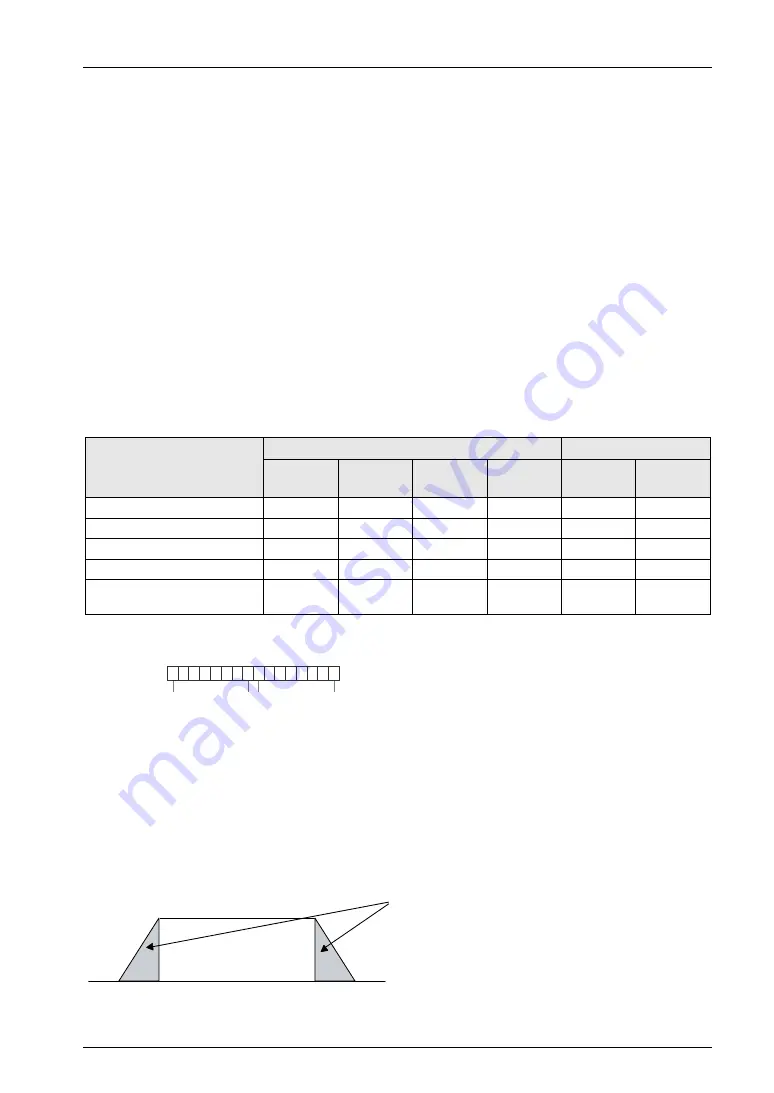
Behaviors when the speed change request turns on while the positioning unit is
accelerating or decelerating the speed
A speed change is possible during J-point control, but impossible during acceleration or
deceleration. A speed change will be made after the unit goes to constant speed when the
speed change signal turns on during acceleration or deceleration. Be sure to input the amount
of movement for positioning with a value that can secure a target constant-speed area.
J-point speed change contact is not effective.
Summary of Contents for AFP7MC16EC
Page 1: ......
Page 19: ...1 Unit Functions and Restrictions ...
Page 28: ...Unit Functions and Restrictions 1 10 ...
Page 29: ...2 Names and Functions of Parts ...
Page 33: ...3 Installation and Wiring ...
Page 47: ...4 Basic Procedure ...
Page 75: ...5 Settings of FP7 MC Unit Using CMI Tool ...
Page 97: ...6 Data Transfer to MC Unit and Test Operation ...
Page 122: ...Data Transfer to MC Unit and Test Operation 6 26 ...
Page 123: ...7 Creation of User Programs ...
Page 131: ...8 Automatic Operation Position Control ...
Page 143: ...8 2 Interpolation Control 8 13 ...
Page 193: ...9 Automatic Operation Synchronous Control ...
Page 251: ...10 Manual Operation JOG Operation ...
Page 257: ...10 2 Changing Speed During JOG Operation 10 7 MEMO ...
Page 263: ...11 Manual Operation Home Return ...
Page 277: ...12 Stop Functions ...
Page 286: ...Stop Functions 12 10 ...
Page 287: ...13 Supplementary Functions ...
Page 336: ...Supplementary Functions 13 50 ...
Page 337: ...14 CMTimeChart Monitor ...
Page 338: ...CMTimeChart Monitor 14 2 14 1 Overview of Function ...
Page 365: ...15 Troubleshooting ...
Page 396: ...Troubleshooting 15 32 ...
Page 397: ...16 Specifications ...
Page 500: ...Specifications 16 104 16 13Dimensions AFP7MC16EC AFP7MC32EC AFP7MC64EC 90 28 80 4 Unit mm ...
Page 502: ......
Page 503: ......
Page 504: ......







































































