





























Chapter 10 Parameter
10.2 Parameter List (SEL Unit)
7. Other parameters
10-44
ME0392-4C
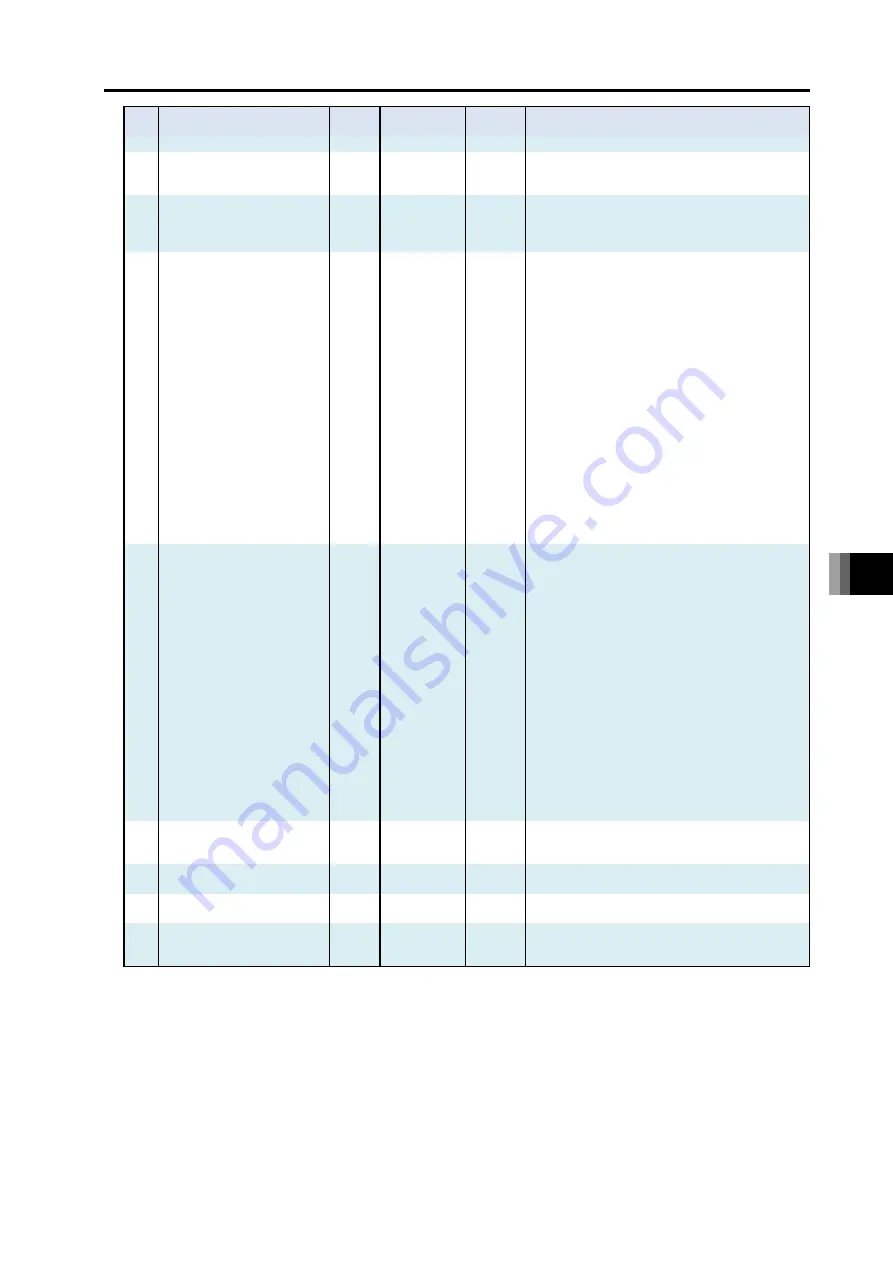
No.
Parameter name
Setting at
Delivery Input range
Unit
Remarks
45 Special start condition setting
0
0H to
FFFFFFFFH
Bits 0 to 3: Enable start from PC/TP in AUTO
mode = Used exclusively by the
manufacturer
(0: Do not enable, 1: Enable)
Bits 4 to 7: PIO program start (input port 000)
Single Startup selected
(0: Normal, 1: Single Startup)
* If set to Single Startup, the next PIO
program start (Input Port 000) will
not be accepted while the program
of the same number as the program
which had PIO program start (Input
Port 0000) previously is being
executed.
Bits 8 to 11: Permission of auto program start when
all-operation-cancellation factor is
present
(0: Do not permit, 1: Permit)
Bits 12 to 15: Permission of ON edge acceptance
for PIO program start (input port 000)
when all-operation-cancellation factor
is present
(0: Do not permit, 1: Permit)
* This parameter specifies an ON-
edge acceptance condition. If the
starting condition is not satisfied,
an “Error No. A1E: Start condition
non-satisfaction error” will
generate.
46 Other setting bit pattern 1
2001H
0H to
FFFFFFFFH
Bits 0 to 3: Reserved by the system
Bits 4 to 7: Decimal-place rounding selection for
real-number
→
integer-variable
assignment in LET/TRAN commands
(0: Do not round, 1: Round)
Bits 8 to 11: Reserved by the system
Bits 12 to 15: Selection of processing to be
performed when subroutine first step
input condition is not specified when
TPCD command = 1
(0: Do not execute, 1: Execute,
2: Error)
Bits 16 to 19: Reserved by the system
Bits 20 to 23: Continuous recovery
movement/operation resumption
timing type
(0: Resume operation after
completion of continuous recovery
movement of all axes using the
same task (same as before),
1: Hold resumption of operation
while any axis is performing
continuous recovery operation
(This does not mean the system
will wait for completion of
continuous recovery movement.))
Bits 24 to 27: Reserved by the system
Bits 28 to 31: Reserved by the system
47 Other setting bit pattern 2
1H
0H to
FFFFFFFFH
Bits 0 to 3: Select if using calendar function
(0: Not to use
1: Use
2: Not to use (using passed time after
having reset))
3: Reserved by the system
* Clear all in the error list after a
change is made.
Bits 4 to 7: Reserved by the system
Bits 8 to 11: Reserved by the system
Bits 12 to 31: For future extension
48 (For expansion)
0
49 Reserved by the system
0
0 to 9
50 Reserved by the system
0
-99,999,999 to
99,999,999
51 (For expansion)
0
10.2 Parameter List (SEL Unit)
7. Other parameters
ME0392-4C
10-45
No.
Parameter name
Setting at
Delivery Input range
Unit
Remarks
52 Reserved by the system
0
53 Fan condition monitoring
setting 1
1H
0H to
FFFFFFFFH
Bit 0: Fan 1 condition monitored
(0: Disable, 1: Enable)
Bits 1 to 31: Reserved by the system
54 Fan condition monitoring
setting 2
20000H
0H to
FFFFFFFFH
Bits 0 to 15: Reserved by the system
Bits 16 to 19: Fan condition monitoring error level
(0: Message level, 1: Cold start level)
Bits 20 to 31: Reserved by the system
55 PC/TP data protect setting 1
0H
0H to
FFFFFFFFH
Bits 0 to 3: Protect type (Program)
(0: Read/write
1: Read only
2: No read/write)
Bits 4 to 7: Protect release method (Program)
(0: Special operation)
Bits 8 to 11: Reserved by the system
Bits 12 to 15: Reserved by the system
Bits 16 to 19: Protect type (Symbol)
(0: Read/write
1: Read only
2: No read/write)
Bits 20 to 23: Protect release method (Symbol)
(0: Special operation)
Bits 24 to 27: Protect type (Parameter)
(0: Read/write
1: Read only
2: No read/write)
Bits 28 to 31: Protect release method (Parameter)
(0: Special operation)
* Referenced by the PC/TP
56 PC/TP data protect setting 2
0H
0H to
FFFFFFFFH
Bits 0 to 3: Protect range maximum number
(Position)
(10’s place, BCD)
Bits 4 to 7: Protect range maximum number
(Position)
(100’s place, BCD)
Bits 8 to 11: Protect range maximum number
(Position)
(1,000’s place, BCD)
Bits 12 to 15: Protect range maximum number
(Position)
(10,000’s place, BCD)
Bits 16 to 19: Protect range minimum number.
(Position)
(10’s place, BCD)
Bits 20 to 23: Protect range minimum number.
(Position)
(100’s place, BCD)
Bits 24 to 31: Reserved by the system
* Referenced by the PC/TP
57
to
60
Reserved by the system
0H
0H to
FFFFFFFFH
61 Number of Connected Power
Supply Unit
0
0 to 5
0: Not Connected
1 to 5: Number of Power Supply Unit Connected
62 Power Supply Unit
Communication Retry Count
3
0 to 255
63
to
200
(For expansion)
0
Summary of Contents for R-unit RSEL
Page 2: ......
Page 5: ...ME0392 4C 2 Quick Start Guide Japanese Only ...
Page 32: ...Actuator Coordinate System Intro 18 ME0392 4C 2 Slider type 3 Table type 0 0 0 0 ...
Page 50: ...Chapter 1 RSEL System 1 4 Installation 1 13 ME0392 4C ...
Page 244: ...Chapter 4 Unit connection Installation and Wiring 4 5 PIO Circuit 4 32 ME0392 4C ...
Page 316: ...Chapter 5 Operation 5 10 ELECYLINDER Operation 5 52 ME0392 4C ...
Page 438: ...Chapter 6 Field Network PIO SIO 6 5 Example of Connectivity Setting 6 120 ME0392 4C ...
Page 532: ...10 6 Servo Gain Adjustment 10 90 10 7 Parameter Configuration Advanced Use 10 93 ...
Page 638: ...Chapter 10 Parameter 10 7 Parameter Configuration Advanced Use 10 106 ME0392 4C ...
Page 838: ...Chapter 14 Warranty 14 Warranty 14 3 ME0392 4C ...
Page 843: ......
Page 844: ......