





























TC1784
Controller Area Network Controller (MultiCAN)
User´s Manual
19-18
V1.1, 2011-05
MLI, V2.0
The baud rate generation of the MultiCAN being based on
f
SYS
, this frequency has to be
chosen carefully to allow correct CAN bit timing. The required value of
f
SYS
is given by
an integer multiple (n) of the CAN baud rate multiplied by the number of time quanta per
CAN bit time. For example, to reach 1 Mbit/s with 20 tq per bit time, possible values of
f
SYS
are given by formula [n × 20] MHz, with n being an integer value, starting at 1.
In order to minimize jitter, it is not recommended to use the fractional divider mode for
high baud rates.
19.3.3
Port Input Control
It is possible to select the input lines for the RXDCANx inputs for the CAN nodes. The
selected input is connected to the CAN node and is also available to wake-up the
system. More details are defined in
on
19.3.4
Suspend Mode
The Suspend Mode can be triggered by the OCDS in order to freeze the state of the
module and to permit access to the registers (at least for read actions). The MultiCAN
module provides two types of Suspend Modes:
•
All actions are immediately stopped (Hard Suspend Mode):
The module clocks
f
CLC
and
f
CAN
are switched off as soon as the suspend request
becomes active. Read and write operations to the module are no longer possible.
This means that the CAN registers cannot be accessed anymore. In this mode, there
is a very high probability that the communication with other CAN devices is made
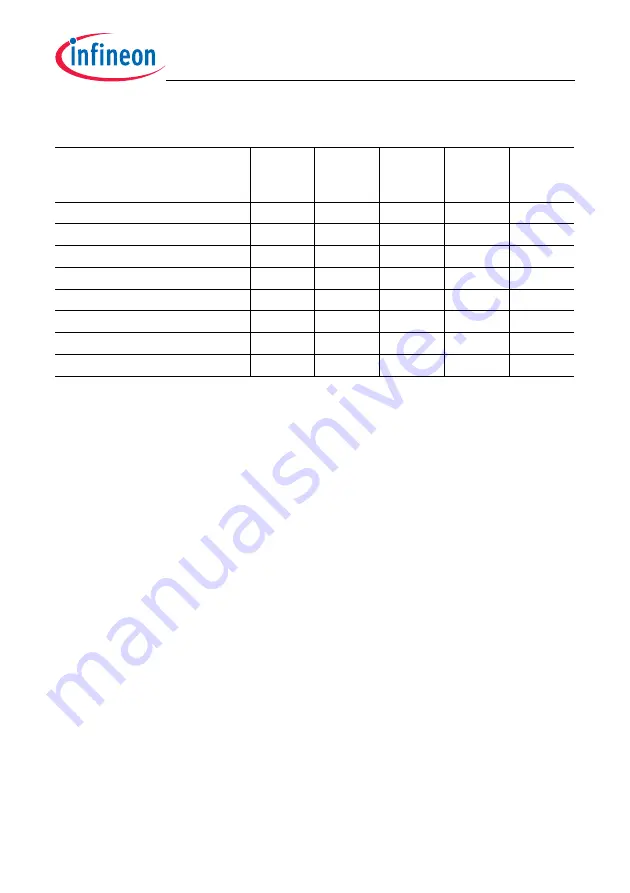
Table 19-2
Minimum Operating Frequencies [MHz]
Number of allocated message
objects MO
1)
, with or without
TTCAN functionality
1) Only those message objects have to be taken into account that are allocated to a CAN node. The unallocated
message objects have no influence on the minimum operating frequency.
1 CAN
node
active
2 CAN
nodes
active
3 CAN
nodes
active
4 CAN
nodes
active
5 CAN
nodes
active
16 MO, without TTCAN
12
19
26
33
40
16 MO, with 1 TTCAN
14
21
28
35
42
32 MO, without TTCAN
15
23
30
37
44
32 MO, with 1 TTCAN
17
25
32
39
46
64 MO, without TTCAN
21
28
37
46
53
64 MO, with 1 TTCAN
23
30
39
48
55
128 MO, without TTCAN
40
45
50
55
61
128 MO, with 1 TTCAN
42
47
52
57
63
Содержание TC1784
Страница 1: ...User s Manual V1 1 2011 05 Microcontrollers TC1784 32 Bit Single Chip Microcontroller ...
Страница 3: ...User s Manual V1 1 2011 05 Microcontrollers TC1784 32 Bit Single Chip Microcontroller ...
Страница 950: ...TC1784 Direct Memory Access Controller DMA User s Manual 11 132 V1 1 2011 05 DMA V3 03 ...
Страница 1949: ...TC1784 General Purpose Timer Array GPTA v5 User s Manual 21 297 V1 1 2011 05 GPTA v5 V1 14 ...
Страница 2350: ...w w w i n f i n e o n c o m Published by Infineon Technologies AG Doc_Number ...





















































