





























9 Servo Parameter Objects
9 - 66
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
•
Set the magnetic pole detection method.
Explanation of Settings
For details on the Magnetic Pole Detection Method, refer to Setting the Magnetic Pole Detection Data
on page 10-9.
Precautions for Correct Use
Precautions for Correct Use
If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
•
Set the force application time for a single force command during magnetic pole position estimation.
•
If the number of motor movement pulses reaches the value set in the Magnetic Pole Position
Estimation Maximum Movement (3924 hex) or larger, the force command will stop even before the
force application time expires.
•
This setting is enabled only when the Magnetic Pole Detection Method (3920 hex) is set to 2
(Magnetic pole position estimation).
Precautions for Correct Use
Precautions for Correct Use
•
If this object is set to a small value, the motor may not show its full performance, resulting in a
poor detection accuracy or a Magnetic Pole Position Estimation Error. If the motor is subjected
to a large load or resistance, set a sufficiently long force command time.
•
The magnetic pole position estimation accuracy may be improved by increasing the set value
in the Magnetic Pole Position Estimation Force Command Time (3922 hex) or Magnetic Pole
Position Estimation Force Command (3923 hex). However, if you set a large value in the
Magnetic Pole Position Estimation Force Command Time (3922 hex), an Overload Error (Error
No. 16.0) will occur depending on the Magnetic Pole Position Estimation Force Command
(3923 hex) setting.
•
The actual command time will be approximately the set value plus 4 ms.
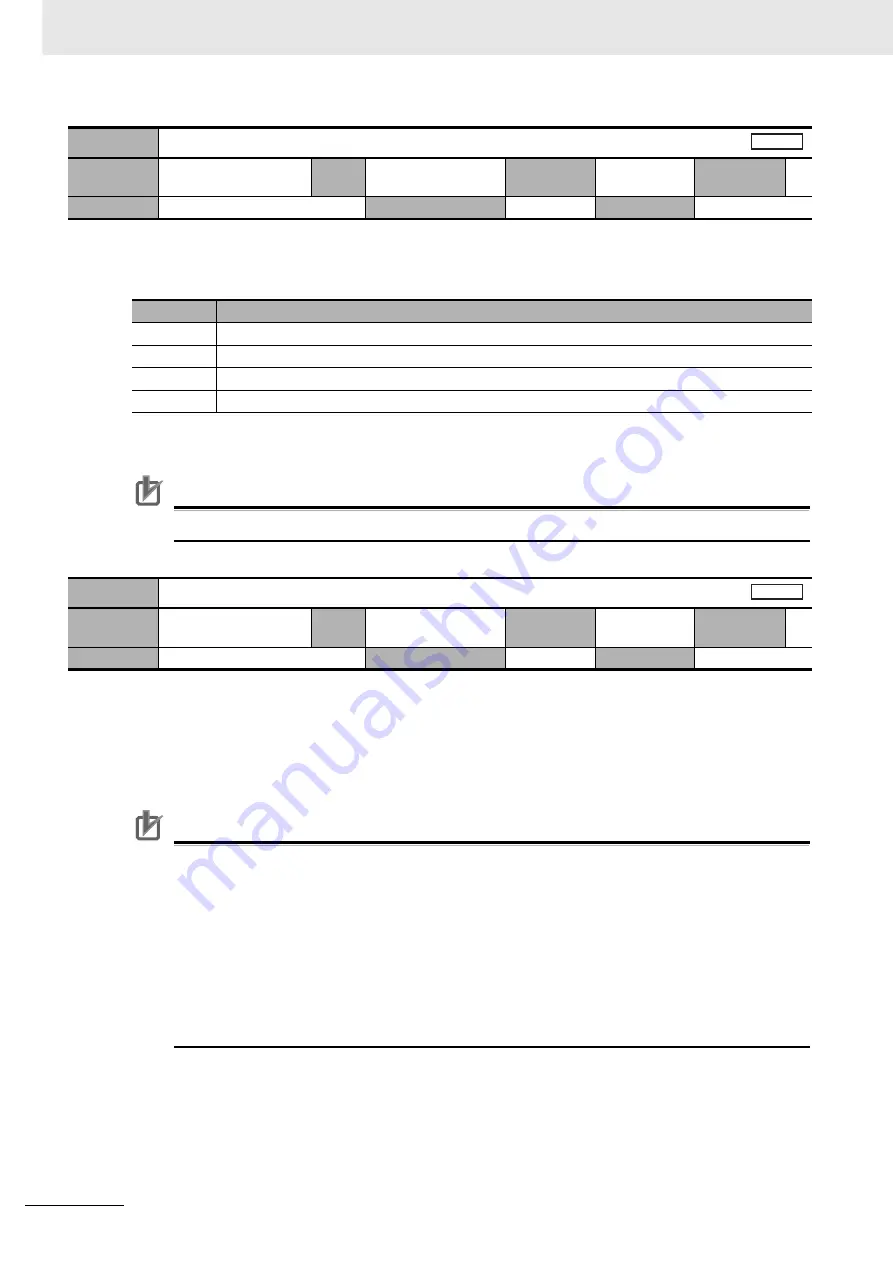
3920 hex
Magnetic Pole Detection Method
Setting
range
0 to 3
Unit
–
Default
setting
0
Data
attribute
R
Size
2 bytes (INT16)
Access
RW
PDO map
Not possible
Set value
Description
0
Not specified
1
Reserved
2
Magnetic pole position estimation method
3
Magnetic pole position restoration method
3922 hex
Magnetic Pole Position Estimation Force Command Time
Setting
range
0 to 200
Unit
ms
Default
setting
200
Data
attribute
B
Size
2 bytes (INT16)
Access
RW
PDO map
Not possible
A l l
A l l







































































