





























8 - 5
8 Safety Function
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
8-
2 Operati
on Exam
ple
8
8-2
Operation Example
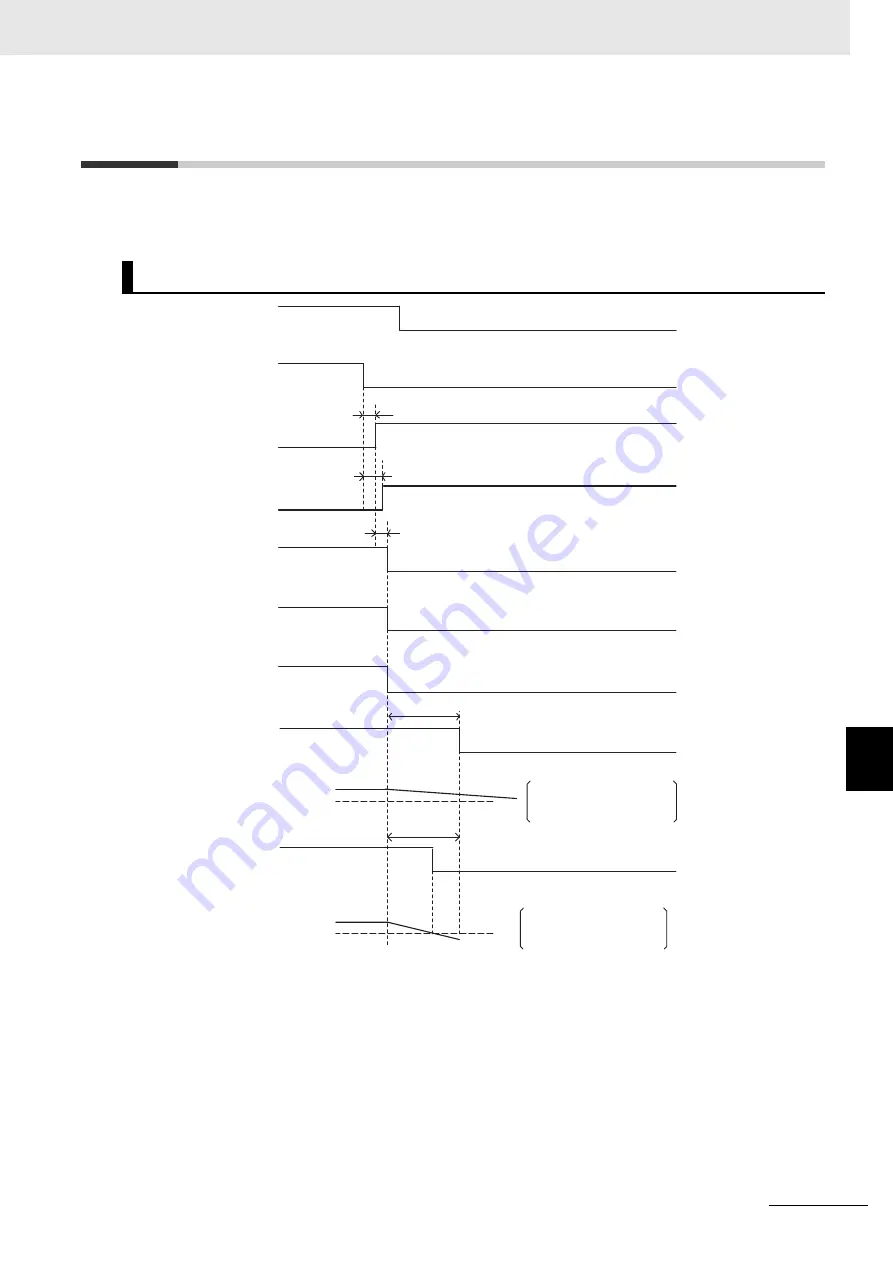
This section provides timing charts showing the operation timings to a safety status and the timing of
return from a safety status.
*1
STO status is entered when either safety input 1 or 2 turns “OFF.”
*2
The dynamic brake operates according to the setting of the Fault reaction option code (605E hex).
*3
t1 is the set value of the Brake Timing During Operation (3438 hex), or the time needed for the motor speed to
drop to or below the Brake Threshold Speed During Operation (3439 hex), whichever occurs first.
Operation Timings to a Safety Status
READY
t1
*3
response time = max. 5 ms
ON
OFF
response time = max. 6 ms
0.5 to 5 ms
Servo ON/OFF
STO status
DB released
DB engaged
Value set in 3438 hex
Value set in 3438 hex
When object 3438 hex
set value comes earlier
When object 3439 hex
set value comes earlier
Motor power
is supplied
Dynamic brake
relay
*2
Brake interlock
output (BKIR)
Servo ready
completed output
(READY)
Error output
(/ALM)
Servo ON
Servo OFF
EDM output
Error
Brake engaged
Brake released
Brake engaged
Safety input 1
Safety input 2
*1
No power supply
Power supply
Normal status
Brake released
Value set in 3439 hex
Normal
Value set in 3439 hex
Brake interlock
output (BKIR)
Motor speed
Motor speed







































































