





























7 Applied Functions
7 - 18
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
*1
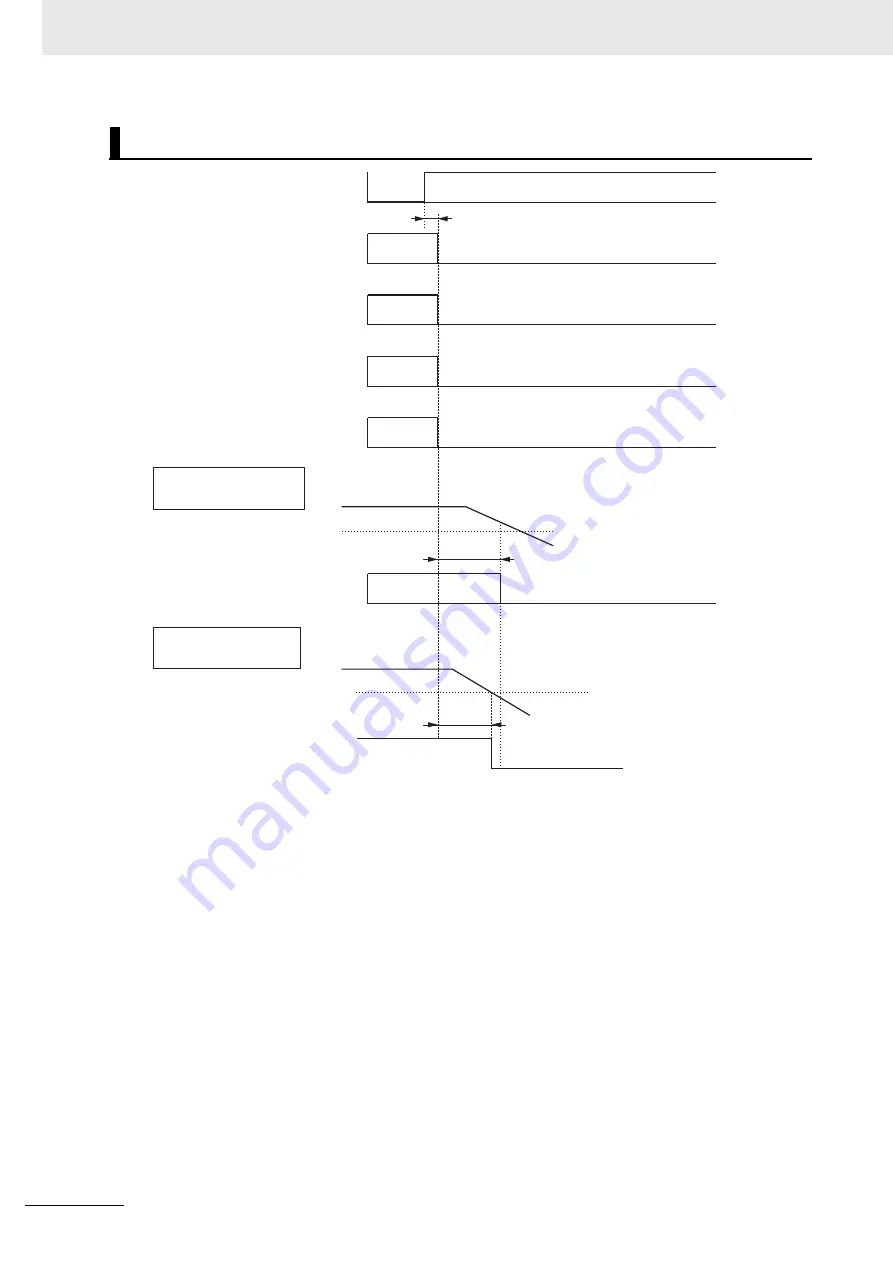
The operation of the dynamic brake when there is an error depends on the setting of the Fault reaction option
code (605E hex).
*2
The Brake Interlock Output (BKIR) turns ON either when a release request is received via servo controls or
when a release request is received via EtherCAT communications. The above example shows when there is no
brake release request from EtherCAT communications.
The BKIR signal is assigned to the general-purpose output (CN1).
*3
“t1” is the period until the value becomes lower than the set value on the Brake. Timing During Operation (3438
hex) or the Brake Threshold Speed During Operation (3439 hex), whichever is shorter.
Note 1
Even when the servo ON input is turned ON again while the motor is decelerating, the system does not
enter the servo ON state until the motor stops.
2
If the main circuit power supply turns OFF while the motor is operating, a phase loss error or main circuit
voltage low error will occur, in which case this operation timing is applied.
Operation Timing When an Error Occurs (Servo ON)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
READY
3438 hex
t1
*3
BKIR
0.5 to 5 ms
DB
released
DB engaged
*1
(/ALM)
When object 3438 hex
set value comes earlier
3439 hex set value
When object 3439 hex
set value comes earlier
3439 hex set value
Motor speed A
Motor speed B
Brake operation
No power supply
Servo Ready
Output (READY)
Error Output
Error
Brake operation
Request to
release brake
Error status
Motor Power Supply
Dynamic
Brake
Normal
Error
Power
supply
Normal
Released
Engaged
Brake Interlock
Output (BKIR)
*2
Brake Interlock
Output (BKIR)
*2
Request to
release brake







































































