



























A - 167
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A
-4 Re
spo
n
se T
ime in
Ethe
rC
AT Proc
ess Dat
a Com
m
u
n
icat
ion
s
A
A-4
-1 Input
Response
Time
A-4
Response Time in EtherCAT
Process Data Communications
The input response time and the output response time for each slave are necessary to calculate the I/O
response time of the system in EtherCAT process data communications.
This section describes the specifications of the input and output response time for this product.
For information on calculating the I/O response time of the system, refer to the manual for the
EtherCAT Master.
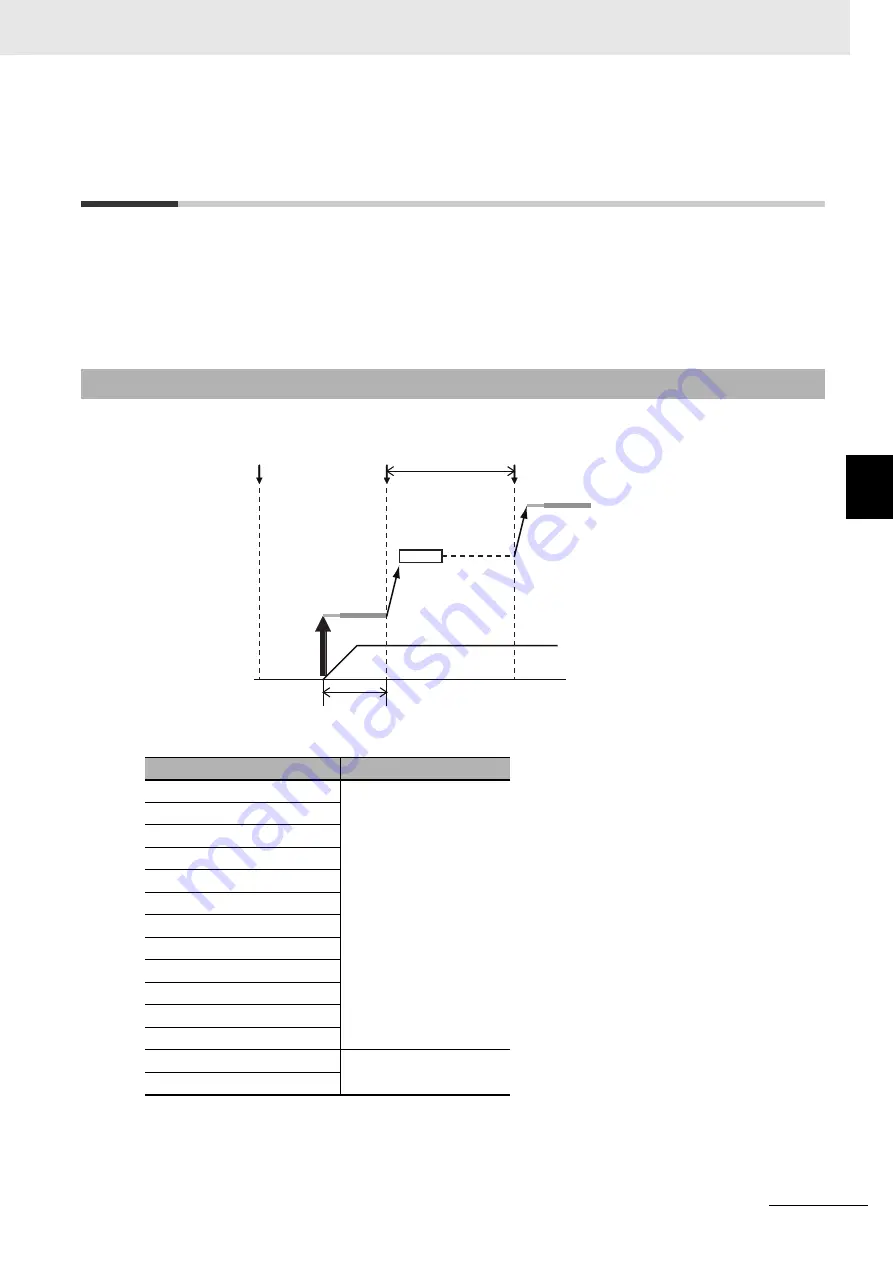
The input response time for this product is shown below.
A-4-1
Input Response Time
Model
Input response time
R88D-KN01L-ECT-L
395 µs
R88D-KN02L-ECT-L
R88D-KN04L-ECT-L
R88D-KN01H-ECT-L
R88D-KN02H-ECT-L
R88D-KN04H-ECT-L
R88D-KN08H-ECT-L
R88D-KN10H-ECT-L
R88D-KN15H-ECT-L
R88D-KN06F-ECT-L
R88D-KN10F-ECT-L
R88D-KN15F-ECT-L
R88D-KN20F-ECT-L
380 µs
R88D-KN30F-ECT-L
Sync0
Sync0
Sync0
Servo
operation
Servo
processing
EtherCAT
communications
Master
processing
Input response time
Calculation
Frame generation
Calculation
Communications
cycle
Refresh







































































