





























10 - 9
10 Operation
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
10-
2 Pr
e
p
aring
fo
r Op
eratio
n
10
1
0-2-4
Prepar
ing th
e Line
ar Motor
for Oper
ation
At the Servo Drive, you need to adjust the current loop gain.
Using the Current Response Auto-adjustment (3912 hex) allows the Servo Drive to automatically set
the calculated value based on the Motor Inductance and Motor Resistance data.
To use the Current Response Auto-adjustment (3912 hex), you must set also the Motor Inductance
(3908 hex) and Motor Resistance (3909 hex).
The magnetic pole detection function detects the positional relationship between a magnetic pole and
an external encoder.
This Servo Drive offers the following two types of magnetic pole detection:
•
Magnetic pole position estimation method
•
Magnetic pole position restoration method
z
Magnetic Pole Position Estimation Method
In Magnetic pole position estimation method, the position of each magnetic pole is estimated
automatically at the first Servo ON after you turn ON the power supply.
The estimated pole position data will be effective until you reset the power supply. After resetting the
power supply, the Servo Drive will perform magnetic pole detection again at the first Servo ON.
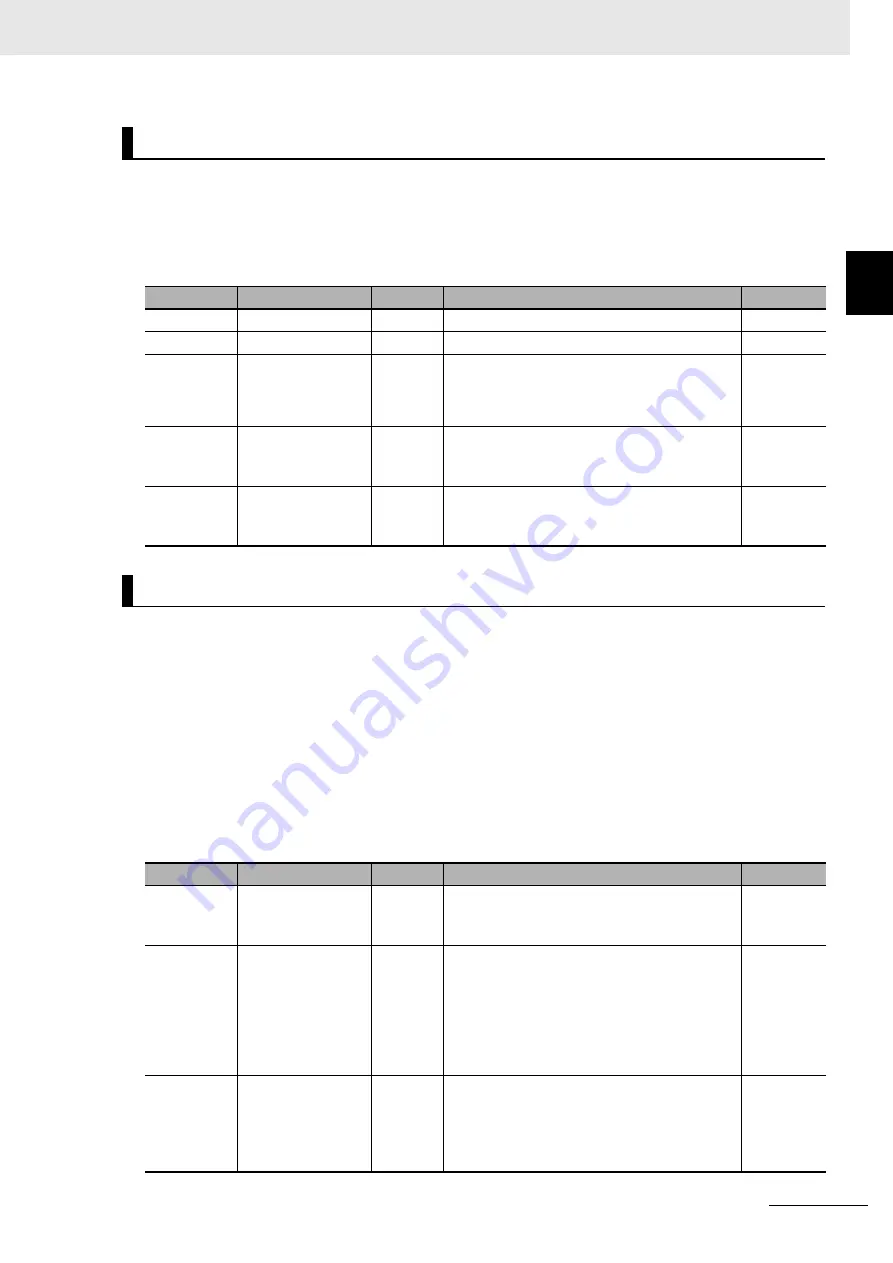
Adjusting the Current Loop Gain
Index
Name
Unit
Description
Reference
3908 hex
Motor Inductance
0.01 mH
Set the phase inductance of the Linear Motor.
3909 hex
Motor Resistance
0.01
Ω
Set the phase resistance of the Linear Motor.
3912 hex
Current Response
Auto-adjustment
%
Set the condition for the electric current
response if you perform the automatic setting of
the Current Loop Proportional Gain (3913 hex)
or Current Loop Integral Gain (3914 hex).
3913 hex
Current Loop
Proportional Gain
–
Set the current loop proportional gain.
Normally, use the value automatically set via the
Current Response Auto-adjustment (3912 hex).
3914 hex
Current Loop
Integral Gain
–
Set the current loop integral gain.
Normally, use the value automatically set via the
Current Response Auto-adjustment (3912 hex).
Setting the Magnetic Pole Detection Data
Index
Name
Unit
Description
Reference
3920 hex
Magnetic Pole
Detection Method
–
Set the magnetic pole detection method.
Select 2 to set the magnetic pole position
estimation method.
3922 hex
Magnetic Pole
Position Estimation
Force Command
Time
ms
Set the force application time for a single force
command during magnetic pole position
estimation to judge the motor movement
direction.
If the motor is subjected to a large load or
resistance, set a sufficiently long force
command time.
*1
3923 hex
Magnetic Pole
Position Estimation
Force Command
%
Set the command force for a single force
command during magnetic pole position
estimation.
If the motor is subjected to a large load or
resistance, set a sufficiently large command force.
*1





















































