




























3 - 38
3. CC-LINK COMMUNICATION FUNCTIONS
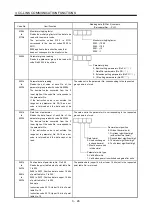
(2) When setting the position command data/point table No. (speed command)
Specify the position address with the remote register, and specify the speed command data by specifying
the point table No. to use the preset servo motor speed, acceleration time constant and deceleration time
constant the speed command data, and execute positioning.
Preset "
1" in parameter No. PC30 to enable position command data-set and point table No. (speed
instruction)-setting operation.
Position instruction
execution completion
(RX(n+2)0)
Forward rotation
Reverse rotation
start
(RYn1 RYn2)
Answer code
(RWrn+2)
Speed instruction
demand
(RY(n+2)1)
Position data setting
Point table No.
designation
6ms
ON
OFF
ON
OFF
ON
OFF
Position instruction data
Lower 16bit (RWwn+4)
Point table No.
(RWwn+6)
Speed instruction
execution completion
(RX(n+2)1)
ON
OFF
Position instruction
demand
(RY(n+2)0)
ON
OFF
Position instruction data
Upper 16bit (RWwn+5)
(Note) Data reserved
Note. This data is stored into RAM of the servo amplifier. Hence, the data is cleared when power is switched off.
Set the lower 16 bits of the position instruction data to Position instruction data under 16 bit (RWwn+4), the
upper 16 bits of the position instruction data to Position instruction data upper 16 bit (RWwn+5), and point
table for speed command No. to point table No. (RWwn+6), and turn Position instruction demand
(RY(n+2)0) and Speed instruction demand (RY(n+2)1) to ON.
Turning RY(n+2)0 and RY(n+2)1 to ON stores the position command data and point table No. into RAM of
the servo amplifier.
When the data are stored, Position instruction execution completion (RX(n+2)0) and Speed instruction
execution completion (RX(n+2)1) turn to ON.
If data outside the setting range is set to any of Position instruction data under 16 bit (RWwn+4), Position
instruction data upper 16 bit (RWwn+5) and point table No. (RWwn+6), the error code (refer to section
3.5.5) is set to Answer code.
Turn Forward rotation start (RYn1) Reverse rotation start (RYn2) to ON after Position instruction execution
completion (RX(n+2)0) and Speed instruction execution completion (RX(n+2)1) have turned to ON.
Summary of Contents for MELSERVO MR-J3-xT
Page 22: ...8 MEMO ...
Page 156: ...4 46 4 SIGNALS AND WIRING MEMO ...
Page 276: ...7 26 7 MR Configurator MEMO ...
Page 324: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 418: ...14 66 14 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...







































































