























3 - 16
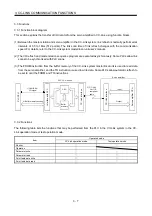
3. CC-LINK COMMUNICATION FUNCTIONS
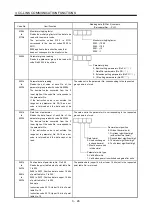
Device No.
Signal name
Description
1 station
occupied
2 stations
occupied
Remarks
Absolute value/incremental
value selection
RY(n+2)B is made valid when the remote register-based
position/speed specifying system is selected with
Position/speed specifying system selection (RY(n+2)A) and
the absolute value command system is selected in parameter
No. PD10. Turn RY(n+2)B OFF or ON to select whether the
set position data is in the absolute value command system or
incremental value command system.
OFF: Position data is handled as an absolute value.
ON : Position data is handled as an incremental value.
RY(n+2)B
Reset
Keeping RY(n+1)A or RY(n+3)A ON for 50ms or longer allows
an alarm to be deactivated.
Some alarms cannot be deactivated by Reset RY(n+1)A or
RY(n+3)A. (Refer to section 11.4.1.)
If RY(n+1)A or RY(n+3)A is turned ON with no alarm
occurring, the base circuit will not be shut off. When "
1 "
is set in parameter No. PD20 (function selection D-1), the
base circuit is shut off.
This signal is not designed to make a stop. Do not turn it ON
during operation.
RY(n+1)A RY(n+3)A
1
Forced stop
This signal is exclusively used as a CN6 external input signal.
It cannot be used for CC-Link.
Opening EMG-DOCOM results in a forced stop status,
switches the servo off, and operates the dynamic brake to
make a sudden stop.
Short EMG-DOCOM in the forced stop status to cancel the
forced stop status.
Summary of Contents for MELSERVO MR-J3-xT
Page 22: ...8 MEMO ...
Page 156: ...4 46 4 SIGNALS AND WIRING MEMO ...
Page 276: ...7 26 7 MR Configurator MEMO ...
Page 324: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 418: ...14 66 14 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...