





























6 - 18
6. PARAMETERS
No. Symbol
Name and Function
Initial Value
Unit
Setting
Range
PB25
For manufacturer setting
Do not change this value by any means.
0000h
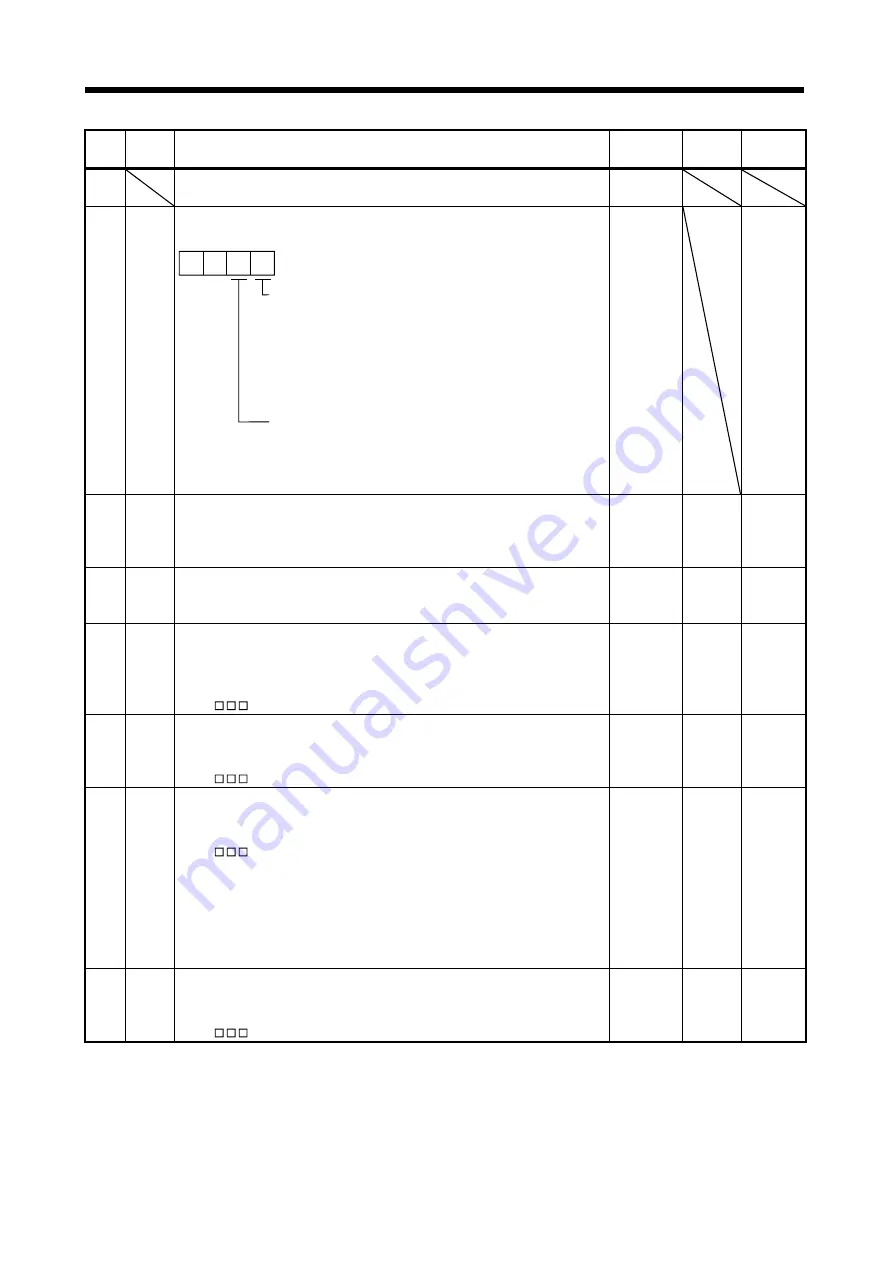
PB26 *CDP Gain
changing
selection
Select the gain changing condition. (Refer to section 10.6.)
Gain changing selection
Under any of the following conditions, the gains
change on the basis of the parameter No. PB29 to
PB32 settings.
0: Invalid
1: Gain changing (RX(n+2)8) is ON
2: Command frequency (Parameter No.PB27 setting)
3: Droop pulse value (Parameter No.PB27 setting)
4: Servo motor speed (Parameter No.PB27 setting)
0 0
Gain changing condition
0: Valid at more than condition (Valid when gain
changing (RX(n+2)8) is ON)
1: Valid at less than condition (Valid when gain
changing (RX(n+2)8) is OFF)
0000h
Refer to
Name and
function
column.
PB27 CDL Gain
changing
condition
Used to set the value of gain changing condition (command frequency, droop
pulses, servo motor speed) selected in parameter No. PB26. The set value unit
changes with the changing condition item. (Refer to section 10.6.)
10 kpps
pulse
r/min
0
to
9999
PB28
CDT Gain changing time constant
Used to set the time constant at which the gains will change in response to the
conditions set in parameters No. PB26 and PB27. (Refer to section 10.6.)
1 ms 0
to
100
PB29 GD2B Gain changing - ratio of load inertia moment to servo motor inertia moment
Used to set the ratio of load inertia moment to servo motor inertia moment when
gain changing is valid.
This parameter is made valid when the auto tuning is invalid (parameter No.
PA08: 3).
7.0 times 0
to
300.0
PB30 PG2B Gain changing - position loop gain
Set the position loop gain when the gain changing is valid.
This parameter is made valid when the auto tuning is invalid (parameter No.
PA08: 3).
37 rad/s 1
to
2000
PB31 VG2B Gain changing - speed loop gain
Set the speed loop gain when the gain changing is valid.
This parameter is made valid when the auto tuning is invalid (parameter No.
PA08: 3).
Note. The setting range of 50000 applies to the servo amplifier whose software
version is A3 or later. The setting range of the servo amplifier whose
software version is older than A3 is 20 to 20000. When the software
version of MR Configurator is A3 or earlier, 20001 or more cannot be set.
Use the display/operation section of the servo amplifier to set 20001 or
more.
823 rad/s 20
to
20000
PB32 VICB Gain changing - speed integral compensation
Set the speed integral compensation when the gain changing is valid.
This parameter is made valid when the auto tuning is invalid (parameter No.
PA08: 3).
33.7 ms 0.1
to
5000.0
Summary of Contents for MELSERVO MR-J3-xT
Page 22: ...8 MEMO ...
Page 156: ...4 46 4 SIGNALS AND WIRING MEMO ...
Page 276: ...7 26 7 MR Configurator MEMO ...
Page 324: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 418: ...14 66 14 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...







































































