





























6 - 10
6. PARAMETERS
6.1.12 Selection of servo motor rotation direction
Parameter
No. Symbol
Name
Initial
Value
Unit Setting
Range
PA14 *POL Rotation direction selection
0
0 1
POINT
This parameter is made valid when power is switched off, then on after
setting, or when the controller reset has been performed.
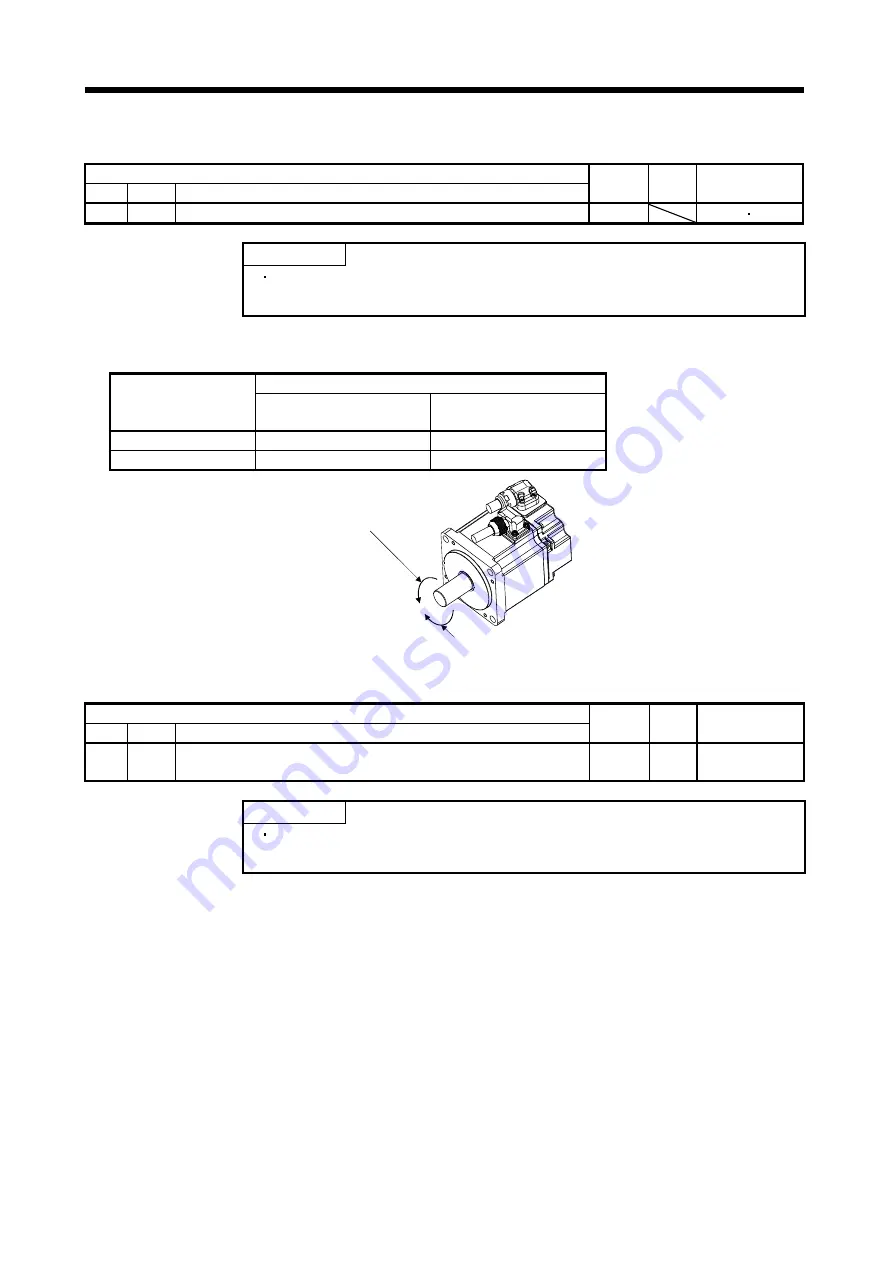
Select servo motor rotation direction relative to the input pulse train.
Servo Motor Rotation Direction
Parameter No. PA14
Setting
Forward rotation start (Ryn1)
ON
Reverse rotation start (Ryn2)
ON
0 CCW CW
1 CW CCW
Forward rotation (CCW)
Reverse rotation (CW)
6.1.13 Encoder output pulse
Parameter
No. Symbol
Name
Initial
Value
Unit Setting
Range
PA15 *ENR Encoder output pulse
4000
pulse/
rev
1 to 65535
POINT
This parameter is made valid when power is switched off, then on after
setting, or when the controller reset has been performed.
Used to set the encoder pulses (A-phase, B-phase) output by the servo amplifier.
Set the value 4 times greater than the A-phase or B-phase pulses.
You can use parameter No. PC19 to choose the output pulse setting or output division ratio setting.
The number of A/B-phase pulses actually output is 1/4 times greater than the preset number of pulses.
The maximum output frequency is 4.6Mpps (after multiplication by 4). Use this parameter within this range.
Summary of Contents for MELSERVO MR-J3-xT
Page 22: ...8 MEMO ...
Page 156: ...4 46 4 SIGNALS AND WIRING MEMO ...
Page 276: ...7 26 7 MR Configurator MEMO ...
Page 324: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 418: ...14 66 14 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...







































































