





























6-50
Drive Control
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
•
S-0-0260, Positioning Acceleration
In this parameter you have to set the acceleration effective during the
automatic control loop setting.
Note:
The command error C1803 can occur due to the above-
mentioned points but also due to a too high degree of inertia.
In this case the entire drive dimensioning has to be checked, if
necessary.
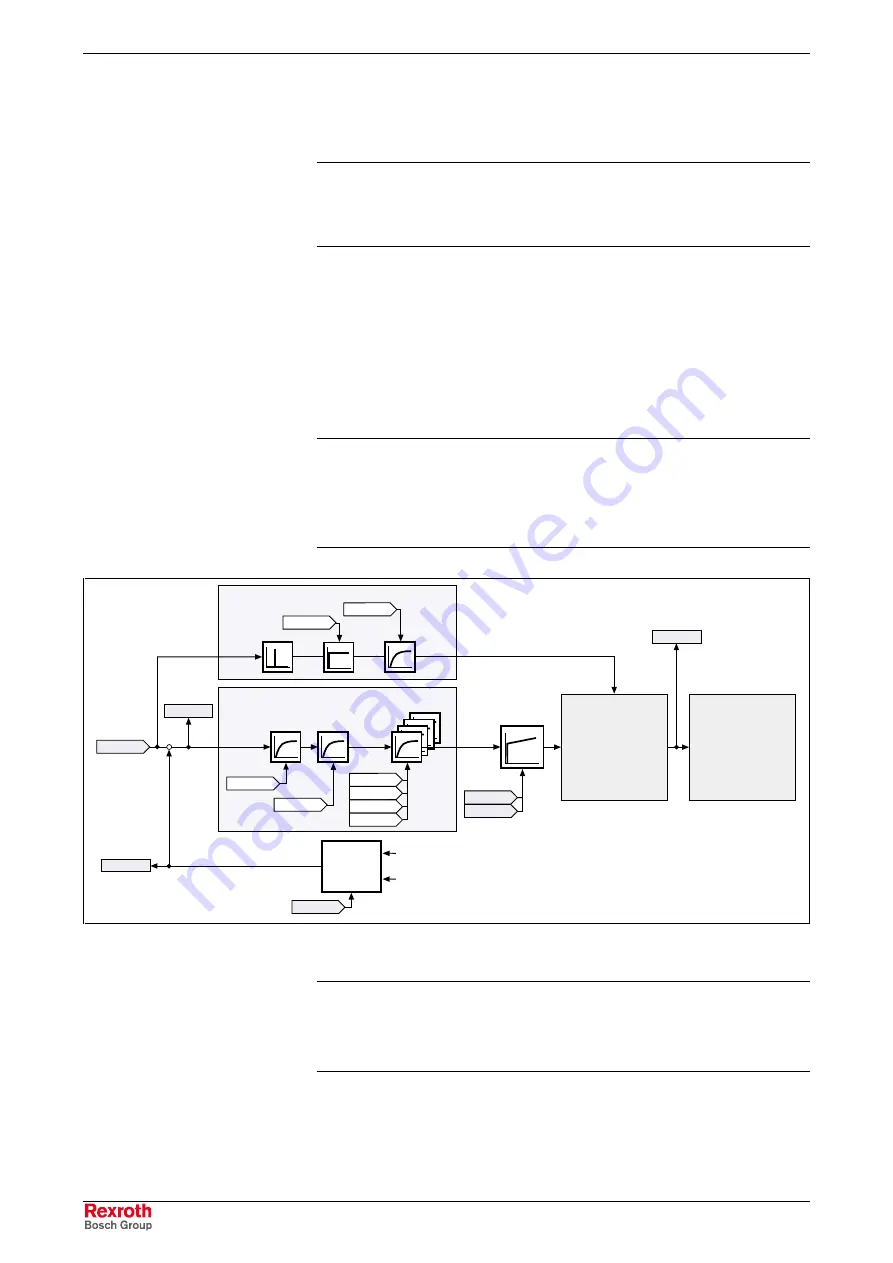
Velocity Loop (with Respective Filters)
Brief Description
In operation with encoder (closed-loop) the drive firmware, apart from the
field-oriented current loop, also closes the velocity control loop in the drive
(PI cascade structure).
Note:
The kind of motor control can be selected via
P-0-0045,
Control word of current controller
(bit
14).
The use of this function requires the firmware package for
closed-loop operation (see "Functional Packages" in chapter
"System Overview").
P-0-1125
P-0-0004
P-0-1126
P-0-0180
P-0-1120
P-0-1121
P-0-1122
P-0-1123
S-0-0100
S-0-0101
motor
control
v
act_motor encoder
v
act_ext. encoder
S-0-0040
P-0-0049
S-0-0347
P-0-0048
DF000064v01_en.fh7
feedforward
actual velocity
filters
-
velocity
loop
P-0-1119
torque/force
and current
limitation
actual
value mix
Fig. 6-34:
Overview of velocity loop
Note:
The following description only refers to the velocity loop with
the respective possibilities of filtering and feedforward.
For the description of velocity command value processing see
section "Velocity Control" in chapter "Operating Modes".
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































