





























6-46
Drive Control
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
DC000010v01_en.FH7
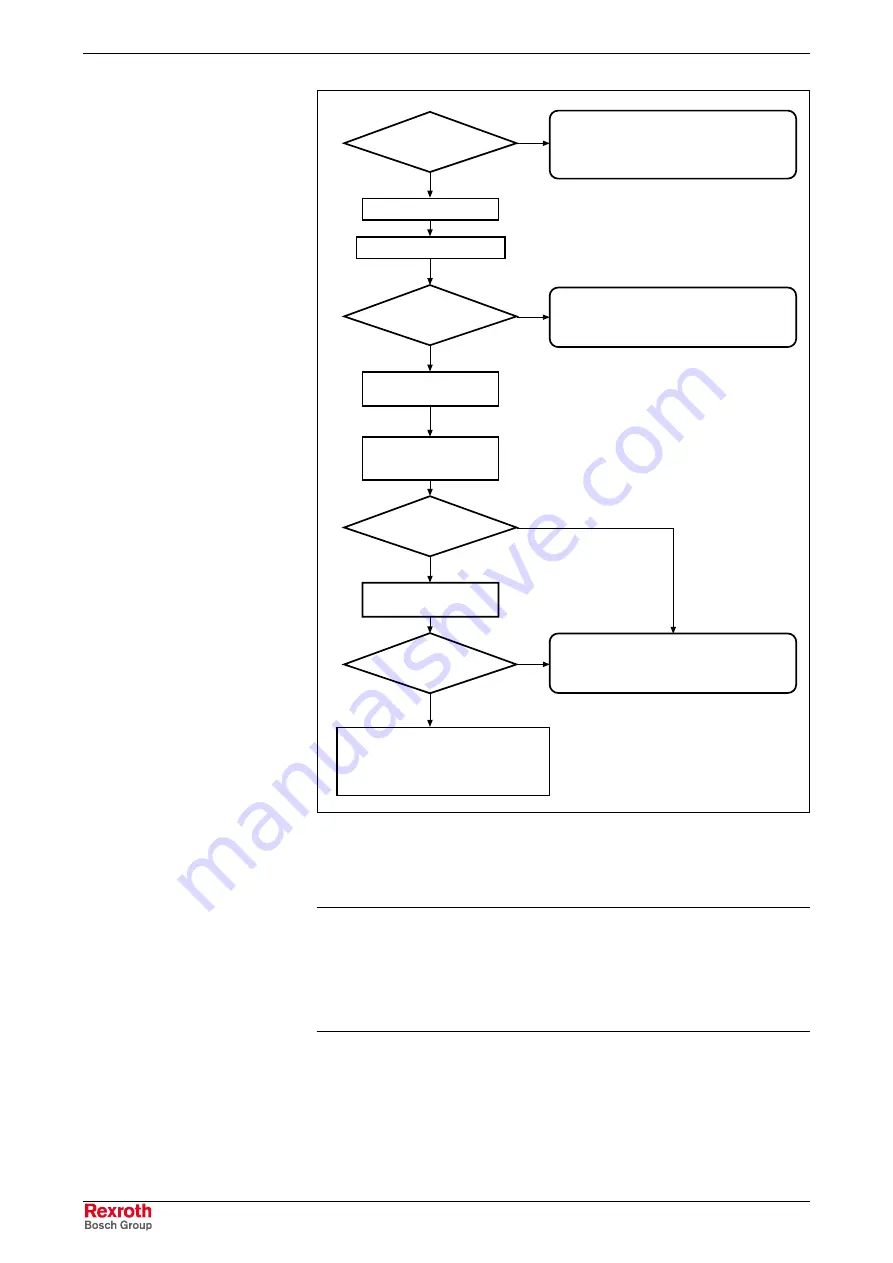
yes
move to center position
determine inertia
no
no
yes
calculate
controller parameters
optimize
velocity control
loop
no
optimize
position control loop
yes
yes
no
store:
- P-0-4010, Load inertia
- max. parameterizable acceleration
- determined controller settings
command start
without error?
step 1:
step 2:
step 3:
Inertia successfully
determined?
C1801 Start requires drive enable
C1802 Motor feedback data not valid
C1805 Travel range invalid
C1806 Travel range exceeded
C1803 Inertia detection failed
®
store default controller settings
step 4:
step 5:
Successfully
optimized?
C1804 Automatic controller setting
failed
®
store default controller settings
step 6:
Successfully
optimized?
step 7:
Fig. 6-29:
Steps of automatic control loop setting
Result of Automatic Control Loop Setting
Note:
The current control loop is not affected during the automatic
control loop setting, as its setting is load-independent and
optimum current controller parameters were already stored in
the motor encoder data memory at the factory.
See also "Notes on Commissioning for Control Loop Setting
(Load Defaults Procedure)" in chapter "Drive Control"
Via
P-0-0165, Selection for autom. controller adjust
it is possible, by
selecting the corresponding bit, to activate (bit = 1) or deactivate (bit = 0)
the respective function of the automatic control loop setting. The result of
automatic control loop setting depends on the selection made in
P-0-0165.
Selection Parameter for
Automatic Control Loop Setting
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































