





























MPH-02, MPB-02, MPD-02
Drive Control
6-3
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
Cycle Times and PWM Frequencies
Depending on the firmware type (MPH, MPD or MPB) and the respective
control section (CSH01.1, CDB01.1, CSB01.1), there are the following
possible cycle times and PWM frequencies:
TA_current
P-0-0001
FWA type
P-0-0556, bit 2
Performance
62.5
µ
s
16000
MPH02
0
Basic
83.3
µ
s
12000
MPH02
0
Basic
125
µ
s
8000
MPH02
MPB02
MPD02
0
Basic
125
µ
s
4000
MPH02
MPB02
MPD02
0
Basic
62.5
µ
s
16000
MPH02
1
Advanced
62.5
µ
s
8000
MPH02
1
Advanced
125
µ
s
4000
MPH02
1
Advanced
TA_current:
sampling time of current loop
P-0-0001:
switching frequency of power output stage (in Hz)
P-0-0556:
control word of axis controller
Fig. 6-3:
Cycle times and switching frequencies that can be set
Note:
As regards the MPH firmware for advanced control sections
(CSH01.1), you can either select basic or advanced
performance via bit 2 of parameter
P-0-0556, Control word of
axis controller
.
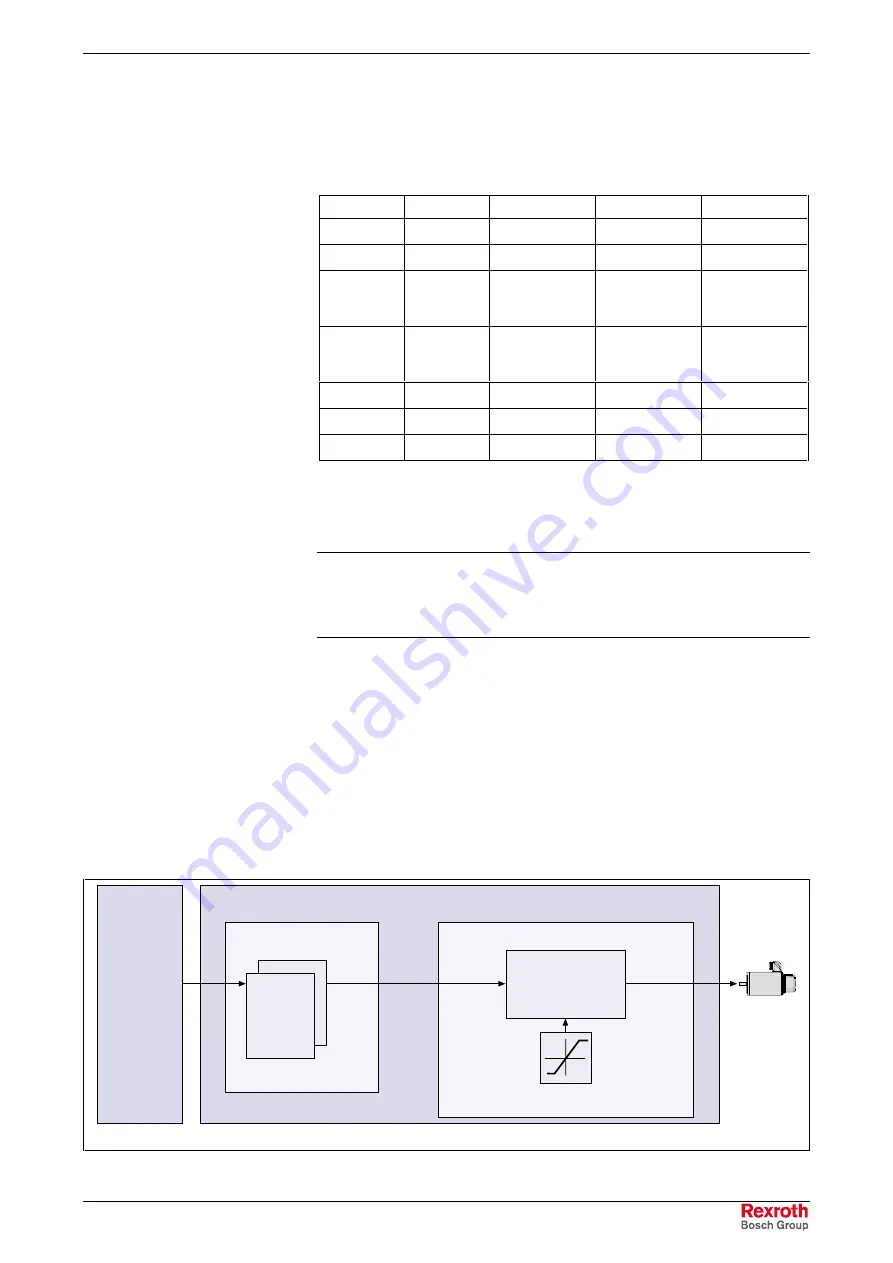
Voltage-Controlled Operation (Open-Loop U/f Control)
Brief Description
The drive function "voltage-controlled operation of asynchronous motors
without encoder in open-loop U/f control" is made available in the base
package "open-loop" in the "velocity control" mode. When the expansion
package "synchronization" has been enabled, the operating mode
"velocity synchronization with real/virtual master axis" is additionally
available.
master
oper. mode 2
oper. mode 1
DF000090v01_en.fh7
open-loop drive control
cmd. value adjustment
(depending on oper. mode)
drive controller
open-loop
motor control
(U/f)
- without encoder -
limitation
torque/current
Fig. 6-4:
Principle of open-loop U/f control
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































