





























8-6
Drive Functions
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
The current status of the position data reference of motor encoder and
external encoder is displayed in parameter
S-0-0403 Position feedback
value status
via the respective bits. They can be mapped to the drive
status word (S-0-0135) by means of assignment. This enables the master
to check the validity of the position data in every communication cycle!
Note:
The following applies to masters which check the validity of the
actual position values via bit 0 of S-0-0403:
The "encoder selection" in
S-0-0147, Homing parameter
determines the value of the respective position status bit of
which encoder is mapped to bit 0 of S-0-0403!
If an external encoder is connected to the controller in addition to the
motor encoder, there are the following possibilities for establishing the
position data reference, independent of the evaluation (relative/absolute)
of the encoder:
•
The position data reference was only established for one of the two
encoders. The actual position value of the other, non-homed encoder
is set to the value of the homed encoder.
•
The position data reference was established for both encoders. The
actual position value of each encoder is an individual value that can be
identical, but does not need to be identical.
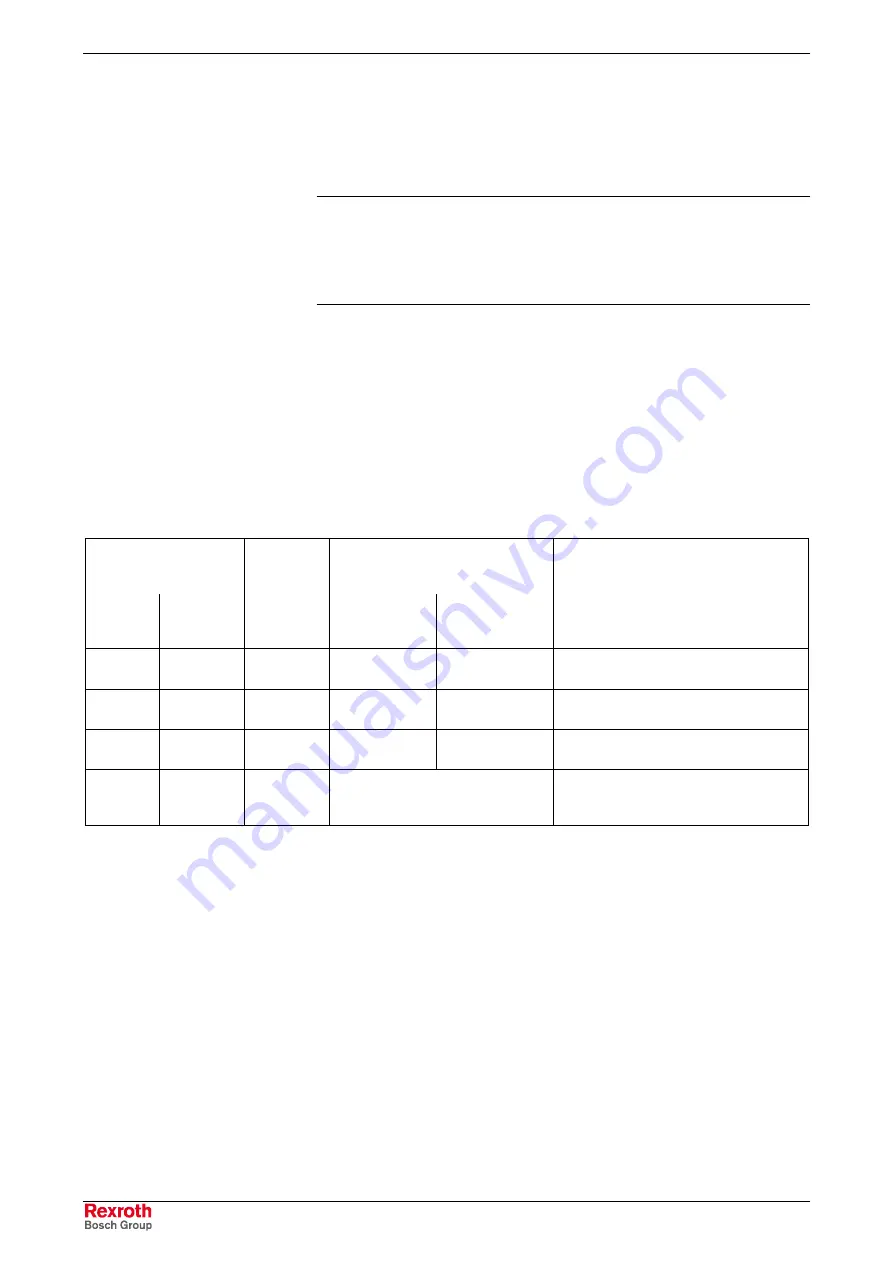
Encoder evaluation
Current
position
status
Actual position values when
switching on
Motor
encoder
External
encoder
(S-0-0403,
bits ..2,1,0)
Motor encoder
(S-0-0051)
External
encoder
(S-0-0053)
Notes on the commissioning status
relative/
absolute
relative/
absolute
0b … 01x
absolute value
motor encoder
absolute value
motor encoder
Position data reference only established
for motor encoder.
relative/
absolute
relative/
absolute
0b … 10x
absolute value
ext. encoder
absolute value
ext. encoder
Position data reference only established
for external encoder.
relative/
absolute
relative/
absolute
0b … 11x
absolute value
motor encoder
absolute value
ext. encoder
Position data reference established for
motor encoder and external encoder.
relative/
absolute
relative/
absolute
0b … 000
see "Absolute Measuring Systems"
or "Relative Measuring Systems"
Position data reference was established
neither for motor encoder nor for
external encoder.
Fig. 8-3:
Actual position values after establishing the position data reference
for motor encoder and external encoder
When the position data reference was established for an encoder there
mostly is a step change of the actual position value. The difference
between the new and the old actual position value is displayed in the
following parameters:
•
S-0-0175, Offset parameter 1
(motor encoder)
•
S-0-0176, Offset parameter 2
(external encoder)
The respective values are written to the offset parameters each time the
position data reference is established. After the drive was switched on the
value, however, is undefined, even if the position data reference has
already been established!
Status Check of Position Data
Reference
Position Data Reference with
Motor Encoder and External
Encoder
Actual Position Value Offset
Before/After Establishing
Position Data Reference
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































