





























382
15. (A) Application Parameters
15.4 PID control
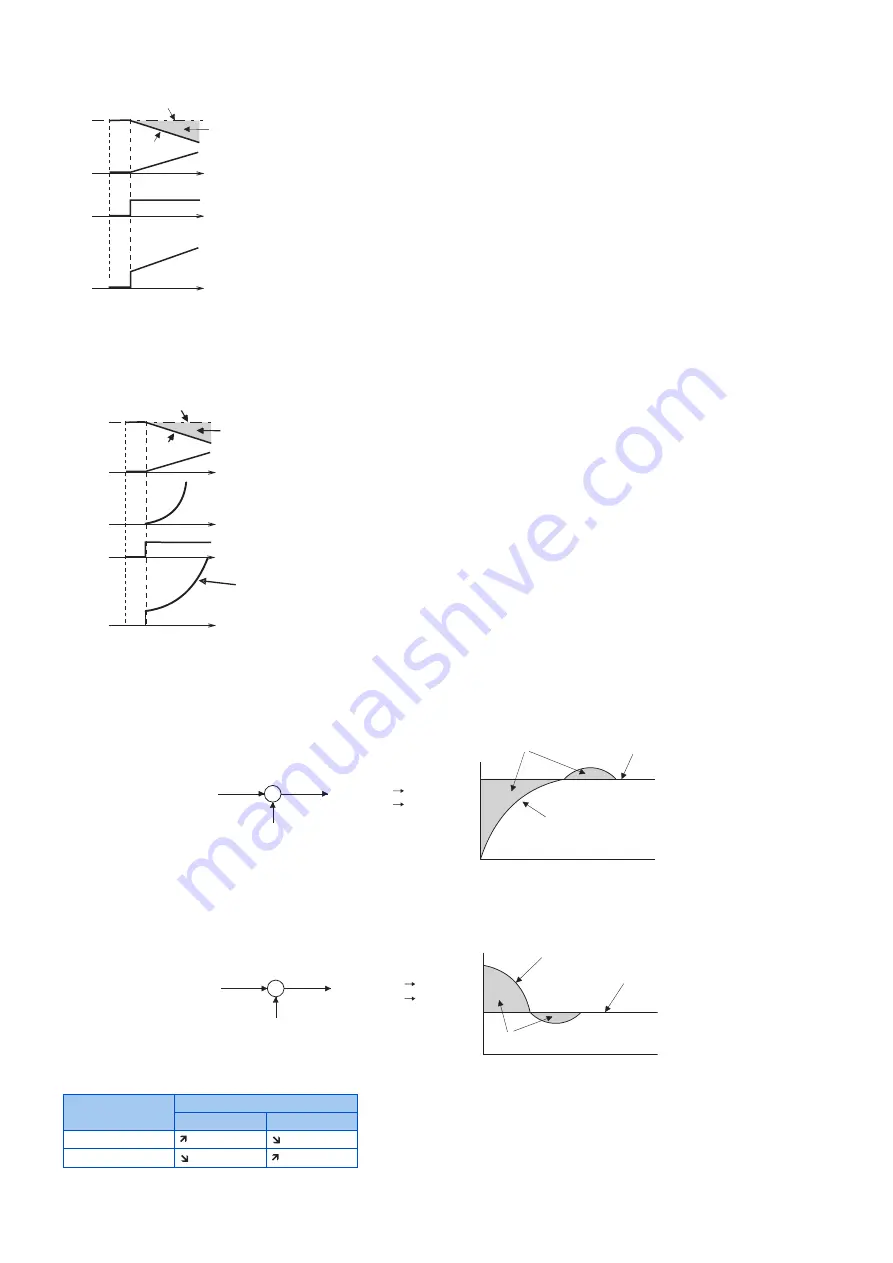
[Example of action when the measured value changes proportionately]
(Note) PD action is the result of P and D actions being added together.
PID action
PID action is a combination of PI and PD action, which enables control that incorporates the respective strengths of these
actions.
(Note) PID action is the result of all P, I and D actions being added together.
Reverse action
When deviation X = (set point - measured value) is a plus value, the manipulated amount (output frequency) is increased, and
when the deviation is a minus value, the manipulated amount is decreased.
Forward action
When deviation X = (set point - measured value) is a minus value, the manipulated amount (output frequency) is increased,
and when the deviation is a plus value, the manipulated amount is decreased.
Relationship between deviation and manipulated amount (output frequency)
PID action setting
Deviation
Plus
Minus
Reverse action
Forward action
Deviation
Set point
Measured value
Time
Time
Time
PD
action
D action
P action
Deviation
Set point
Measured value
Time
Time
Time
PID action
D action
P action
I action
Time
y = at
2
+ bt + c
Set
point
X>0
X<0
Feedback signal
(measured value)
+
-
[Heating]
Deviation
Set point
Measured value
Cold
Hot
Increase
Decrease
Set
point
X>0
X<0
Feedback signal
(measured value)
+
-
[Cooling]
Deviation
Set point
Measured value
Too cold
Hot
Decrease
Increase
Содержание FR-E800
Страница 17: ...16 1 Introduction 1 3 Related manuals MEMO ...
Страница 51: ...50 2 Basic Operation 2 8 I O terminal function assignment MEMO ...
Страница 89: ...88 3 Parameters 3 4 Parameter list by function group number MEMO ...
Страница 135: ...134 5 Speed Control 5 9 Troubleshooting in the speed control MEMO ...
Страница 153: ...152 6 Torque Control 6 7 Troubleshooting in torque control MEMO ...
Страница 195: ...194 8 E Environment Setting Parameters 8 18 Current average value monitor signal MEMO ...
Страница 237: ...236 10 D Operation Command and Frequency Command 10 6 Operation by multi speed setting MEMO ...
Страница 339: ...338 13 T Multi Function Input Terminal Parameters 13 9 Start signal operation selection MEMO ...
Страница 455: ...454 16 G Control Parameters 16 13 Speed smoothing control MEMO ...
Страница 481: ...480 18 Appendix 18 4 Parameters functions and instruction codes under different control methods MEMO ...







































































