Program features
87
Speed matching (internal overload protection)
The Speed matching function is an internal overload protection function. It
supervises the motor torque. The function checks that the motor follows the speed
reference during acceleration and deceleration, and does not have an excessive
speed error during acceleration, deceleration and when running at the constant
speed.
There are two different parameters that can be used to define the speed matching
deviation, one during acceleration/deceleration and the other during steady state.
Parameter
SPD DEV LEV is used to check the deviation when the motor is
running in the steady state or when the motor is not accelerating or decelerating.
This is defined in terms of percentage of Par.
Parameter
SPD CHG PER SEC, the rate of the actual speed change in % per
second in terms of percentage of Par.
MAXIMUM SPEED, can be set so that
the difference between the rate of change of the motor speed and the rate of change
of the ramped speed reference is within this value during acceleration or
deceleration. If the difference between the rate of change of the motor speed and the
rate of change of the ramped speed reference is greater than the setting of Par.
for a period of Par.
SPD MATCH FLT TD, the drive trips on SPD MATCH
FLT.
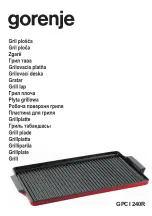
Example
: Acceleration/deceleration ramp times are set to, for example, 3 seconds.
The maximum speed is 1500 rpm. Therefore, the drive speed reference should ramp
at 500 rpm/s or 33%/s. With SPD CHG PER SEC set to 2% / s (30 rpm/s), the drive
does not trip on SPD MATCH FLT during acceleration/deceleration as long as the
rate of change of the motor speed is within (31% to 35%). In the steady state, if the
SPD DEV LEV is set to 10%, the drive will trip when the difference between the
major speed and the ramped speed reference is greater than 150 rpm (10% of 1500
is 150 rpm). See the following figure. If the speed deviation is outside the window as
shown in the figure, the drive will wait for the Par.
SPD MATCH FLT TD period
and then trip on the SPD MATCH FLT fault.
The speed change must be within 31% (= 470 rpm/s) and 35% (= 530 rpm/s).
(rpm)
(s)
500rpm
1000rpm
1500rpm
1s 2s 3s
1650rpm
1350rpm
500rpm
500rpm
500rpm
(rpm)
(s)
500rpm
1000rpm
1500rpm
1s 2s 3s
1650rpm
1350rpm
500rpm
500rpm
500rpm
500rpm
1000rpm
1500rpm
1s 2s 3s
1650rpm
1350rpm
500rpm
500rpm
500rpm
Summary of Contents for ACS 800 Series
Page 1: ...ACS800 Firmware Manual Crane Control Program N697 ...
Page 4: ......
Page 26: ...Start up and control through the I O interface 26 ...
Page 36: ...Quick start up guide 36 ...
Page 52: ...Control panel 52 ...
Page 105: ...Program features 105 Figure Control diagram for Shaft synchronisation executed in 20 ms ...
Page 128: ...Program features 128 ...
Page 150: ...Application macros control location EXT1 EXT2 150 ...
Page 228: ...Actual signals and parameters 228 ...
Page 299: ...Adaptive Programming examples for crane control 299 ...
Page 305: ...Adaptive Programming examples for crane control 305 ...
Page 318: ...Analogue Extension Module 318 ...
Page 332: ...Additional data actual signals and parameters 332 ...
Page 334: ...DriveWindow 334 ...
Page 335: ...Control block diagrams 335 Control block diagrams ...
Page 336: ...Control block diagrams 336 ...
Page 337: ...Control block diagrams 337 ...
Page 338: ...Control block diagrams 338 ...
Page 340: ...www abb com drives www abb com drivespartners Contact us 3AFE68775230 Rev E EN 2012 09 25 ...