





























Fieldbus control
258
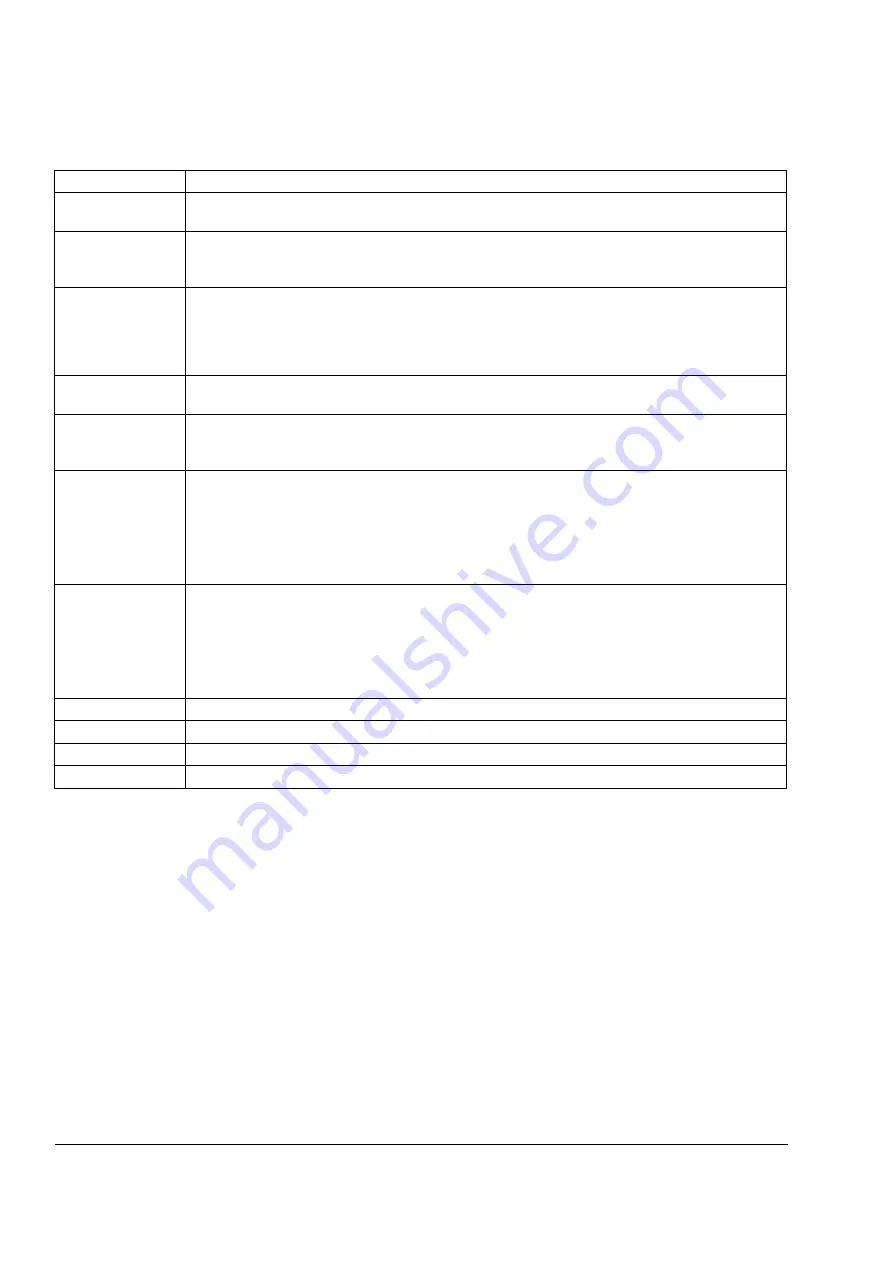
Drive commands supported by the Generic Drive communication profile
Name
Description
STOP
The drive decelerates the motor to zero speed according to the active deceleration ramp
(parameter 22.03 or 22.05).
START
The drive accelerates to the set reference value according to the active acceleration ramp (Par.
22.02 or 22.04). The direction of rotation is determined by the sign of the reference value and the
setting of par. 10.03.
COAST STOP
The drive coasts to stop, that is the drive stops modulating. However, this command can be
overridden by the Brake Control function, which forces the drive to decelerate to zero speed by the
active deceleration ramp. When the Brake Control function is active, Coast stop and Emergency
coast stop (OFF2) commands given after the Emergency ramp stop (OFF3) coast the drive to
a stop.
QUICK STOP
The drive decelerates the motor to zero speed within the emergency stop deceleration time
defined with Par. 22.07.
CURRENT LIMIT
STOP (CLS)
The drive decelerates the motor to zero speed according to the set current limit (Par. 20.03) or
torque limit (20.04), whichever is first reached. The same procedure is valid in case of a Voltage
Limit Stop (VLS).
INCHING1
With this command active, the drive accelerates the motor to Step reference 3 (defined with Par.
12.04). After the command is removed, the drive decelerates the motor to zero speed.
Note:
The speed reference ramps are not effective. The speed change rate is only limited by the
current (or torque) limit of the drive.
Note:
Inching 1 takes priority over Inching 2.
Note:
Not effective in Scalar control mode.
INCHING2
With this command active, the drive accelerates the motor to Step reference 4 (defined with Par.
12.05). After the command is removed, the drive decelerates the motor to zero speed.
Note:
The speed reference ramps are not effective. The speed change rate is only limited by the
current (or torque) limit of the drive.
Note:
Inching 1 takes priority over Inching 2.
Note:
Not effective in Scalar control mode.
RAMP OUT ZERO
When active, forces the output of the reference function generator to zero.
RAMP HOLD
When active, freezes the reference function generator output.
FORCED TRIP
Trips the drive. The drive will indicate fault FORCED TRIP.
RESET
Resets an active fault.
Summary of Contents for ACS 800 Series
Page 1: ...ACS800 Firmware Manual Crane Control Program N697 ...
Page 4: ......
Page 26: ...Start up and control through the I O interface 26 ...
Page 36: ...Quick start up guide 36 ...
Page 52: ...Control panel 52 ...
Page 105: ...Program features 105 Figure Control diagram for Shaft synchronisation executed in 20 ms ...
Page 128: ...Program features 128 ...
Page 150: ...Application macros control location EXT1 EXT2 150 ...
Page 228: ...Actual signals and parameters 228 ...
Page 299: ...Adaptive Programming examples for crane control 299 ...
Page 305: ...Adaptive Programming examples for crane control 305 ...
Page 318: ...Analogue Extension Module 318 ...
Page 332: ...Additional data actual signals and parameters 332 ...
Page 334: ...DriveWindow 334 ...
Page 335: ...Control block diagrams 335 Control block diagrams ...
Page 336: ...Control block diagrams 336 ...
Page 337: ...Control block diagrams 337 ...
Page 338: ...Control block diagrams 338 ...
Page 340: ...www abb com drives www abb com drivespartners Contact us 3AFE68775230 Rev E EN 2012 09 25 ...






































































