





























252
7 CONTROL SUB FUNCTIONS
7.5 Functions that Change Control Details
Control precautions
• When 0 is set in [Cd.10] New acceleration time value and [Cd.11] New deceleration time value, the acceleration/
deceleration time is not changed even if the speed change is performed. In this case, the operation is controlled at the
acceleration/deceleration time previously set in the parameters.
• New acceleration/deceleration time is valid during the execution of the positioning data for which the speed change was
performed. In the continuous positioning control and continuous path control, even though the speed change is performed
and the acceleration/deceleration time has been changed to the new acceleration/deceleration time ([Cd.10] and [Cd.11]),
the control will be performed at the previously set acceleration/deceleration time when switching to the next positioning
data is performed.
• Even if the acceleration/deceleration time change is set to be disabled after New acceleration/deceleration time is
validated, the positioning data for which New acceleration/deceleration time was validated continues to be controlled with
that value. (The next positioning data is controlled at the acceleration/deceleration time set in the parameters in advance.)
• If New acceleration/deceleration time is set to 0 and the speed change is performed after New acceleration/deceleration
time is validated, the operation is controlled at the previous New acceleration/deceleration time.
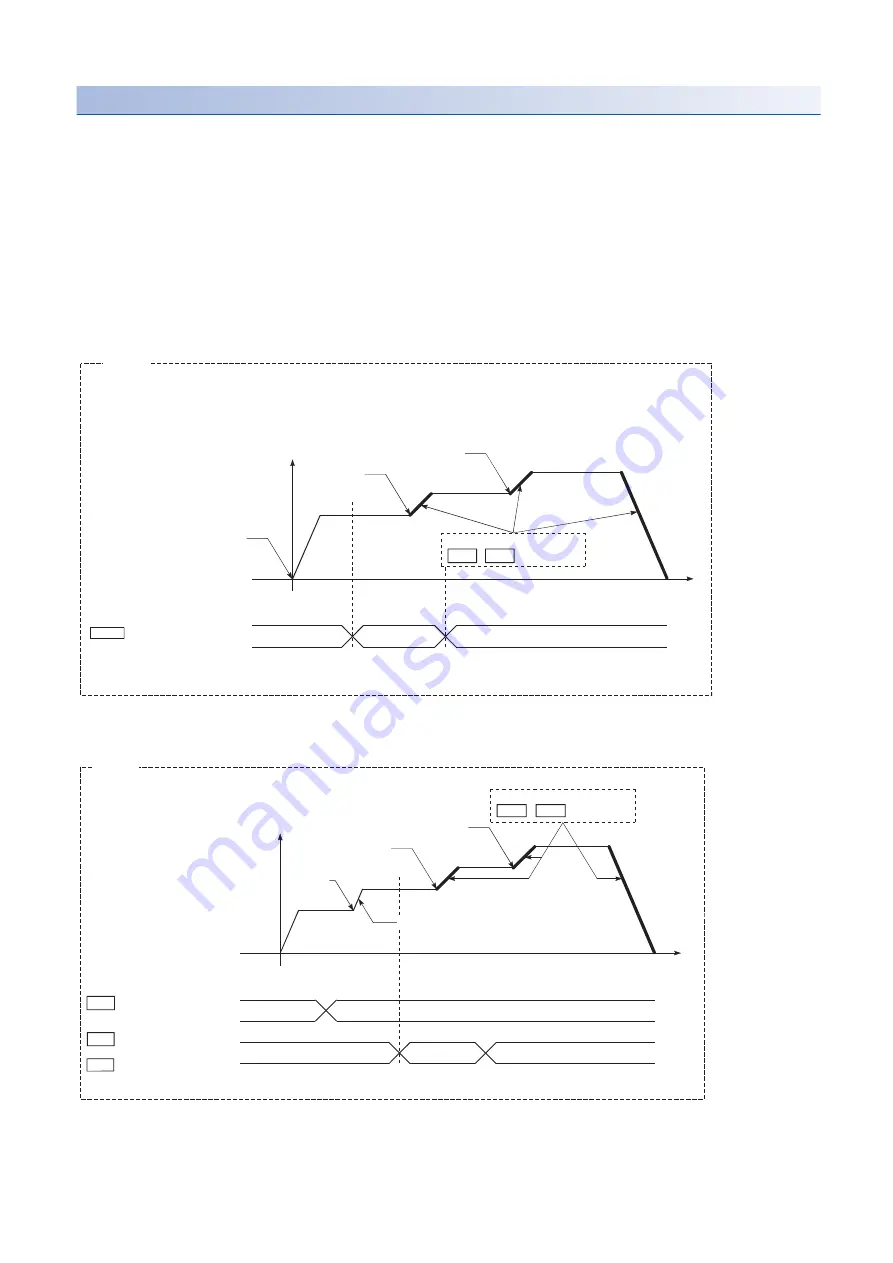
Cd.12
t
V
Enable
Speed
change
New acceleration/deceleration time
( Cd.10 , Cd.11 )
Disable
Speed
change
Positioning start
Disable
Example
Acceleration/deceleration time
change during speed change,
enable/disable selection
Cd.12
Cd.10
Cd.11
t
V
0
0
1000
Disable
Enable
Speed
change
New acceleration/deceleration time
( Cd.10 , Cd.11 )
New acceleration time value/
Example
Speed
change
Speed
change
Controlled with the acceleration/deceleration
time in the parameter.
Acceleration/deceleration time
change during speed change,
enable/disable selection
New deceleration time value
Содержание MELSEC iQ-R RD75P4
Страница 1: ...MELSEC iQ R Positioning Module User s Manual Application RD75P2 RD75P4 RD75D2 RD75D4 ...
Страница 2: ......
Страница 13: ...11 MEMO ...
Страница 19: ...17 CONTENTS INDEX 588 REVISIONS 592 WARRANTY 593 TRADEMARKS 594 ...
Страница 498: ...496 13 PROGRAMMING 13 2 List of Labels Used ...
Страница 503: ...13 PROGRAMMING 13 4 Program Example 501 13 ...
Страница 511: ...13 PROGRAMMING 13 4 Program Example 509 13 Torque change program Step operation program Skip program ...
Страница 512: ...510 13 PROGRAMMING 13 4 Program Example Teaching program Continuous operation interrupt program ...
Страница 513: ...13 PROGRAMMING 13 4 Program Example 511 13 Target position change program Absolute position restoration program ...
Страница 514: ...512 13 PROGRAMMING 13 4 Program Example Restart program Parameter data initialization program ...
Страница 515: ...13 PROGRAMMING 13 4 Program Example 513 13 Flash ROM write program Error reset program ...
Страница 516: ...514 13 PROGRAMMING 13 4 Program Example Stop program ...
Страница 565: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 563 A ...
Страница 568: ...566 APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted Common program ...
Страница 584: ...582 APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted Restart program ...
Страница 587: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 585 A Stop program ...
Страница 597: ......







































































