





























K465i Operations and Maintenance
P/N 1212831 Rev C
Page 4-48
Copyright
©
2012
Veeco Instruments, Inc. Confidential
All Rights Reserved
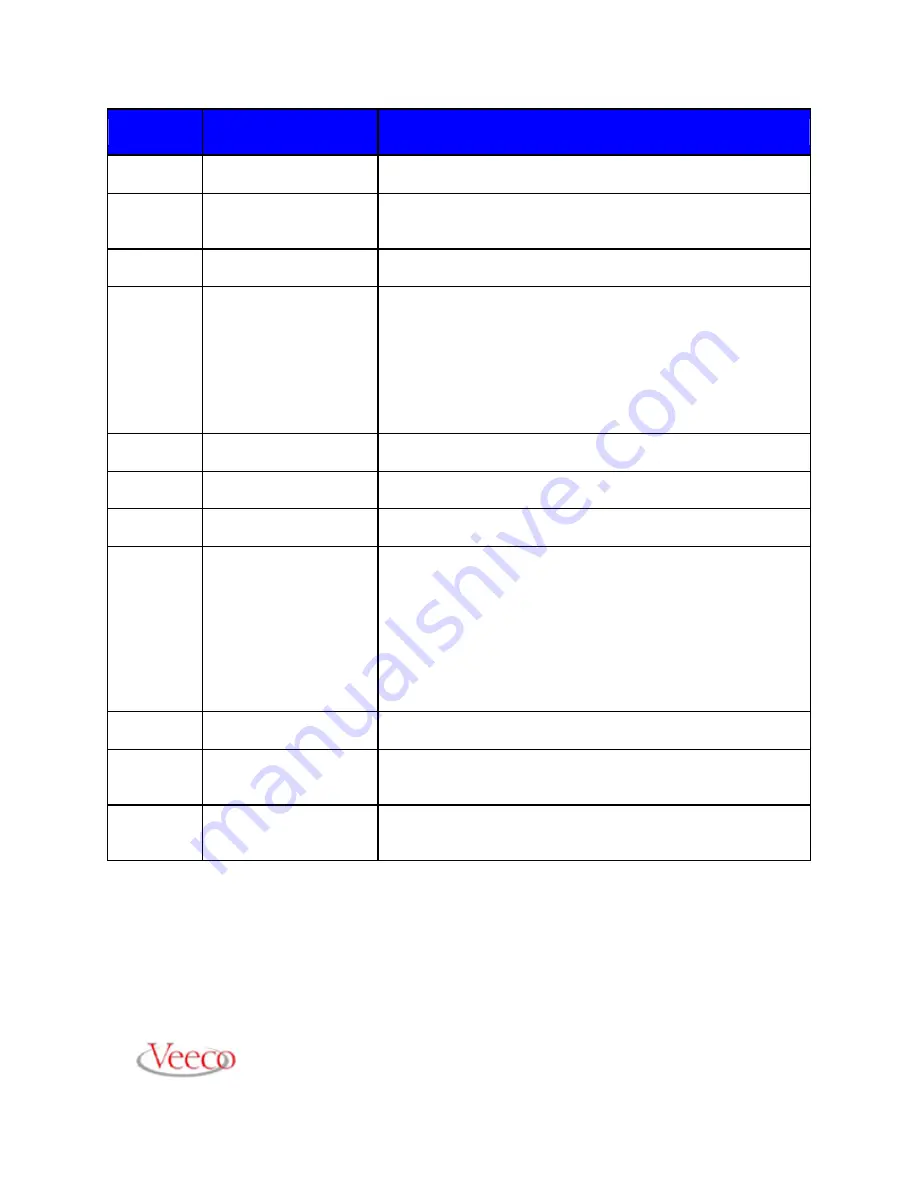
COMMAND
SIMPLE SYNTAX
EXAMPLE
DESCRIPTION
SOF
SOF Station, Value
SOF H, 0
This command sets the offset for the specified station.
SRP
SRP Station, Value
SRP V, -135000
This command sets the retracted position of a station.
This is the R coordinate the arm goes to, prior to and
after the PUT and GET commands are executed.
RCP
RCP Axis
RCP R
This command reads the absolute position of a specified
axis, if no axis is specified T, R, Z (Z3) are returned.
RSC
RSC Station
RSC G
This command reads the absolute coordinates for the
axes of the specified station. It returns the coordinates
in a T, R, Ry, Z, Z1, Z2 format.
Z=Z3 with Z1 and Z2 being relative to Z3 for tilt
purposes.
Note:
Ry is the yaw component for the GB7/8 robots,
for GB9 robots the number is ignored.
RST
RST Station
RST C
This command reads the absolute value of the stroke of
the specified station.
ROF
ROF Station
ROF C
This command reads the offset of the specified station.
RRP
RRP Station
RRP C
This command reads the absolute coordinate for the R
axis of the retract position of the station specified.
HOM
HOM
This command homes the robot sensors to their zero
positions or absolute positions.
The arm must be fully inside the loadlock chamber
before executing the HOM command safely.
The arm
should not be holding a wafer carrier
when the
HOM
command is executed. After homing the robot, use the
RSA command to restore the working speed and
accelerate, as the homing procedure will reset them to
their defaults.
HIS
HIS
This command displays information about recent
commands executed and exceptional events
STP
STP
This command stops the motion of the specified axis
servomotor. If no axis is specified, then all servomotors
stop.
MTP
MTP Station
MTP H
This command moves the robot directly to the taught
position of the given station. The robot will not retract
first.







































































