





























7 Applied Functions
7 - 24
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
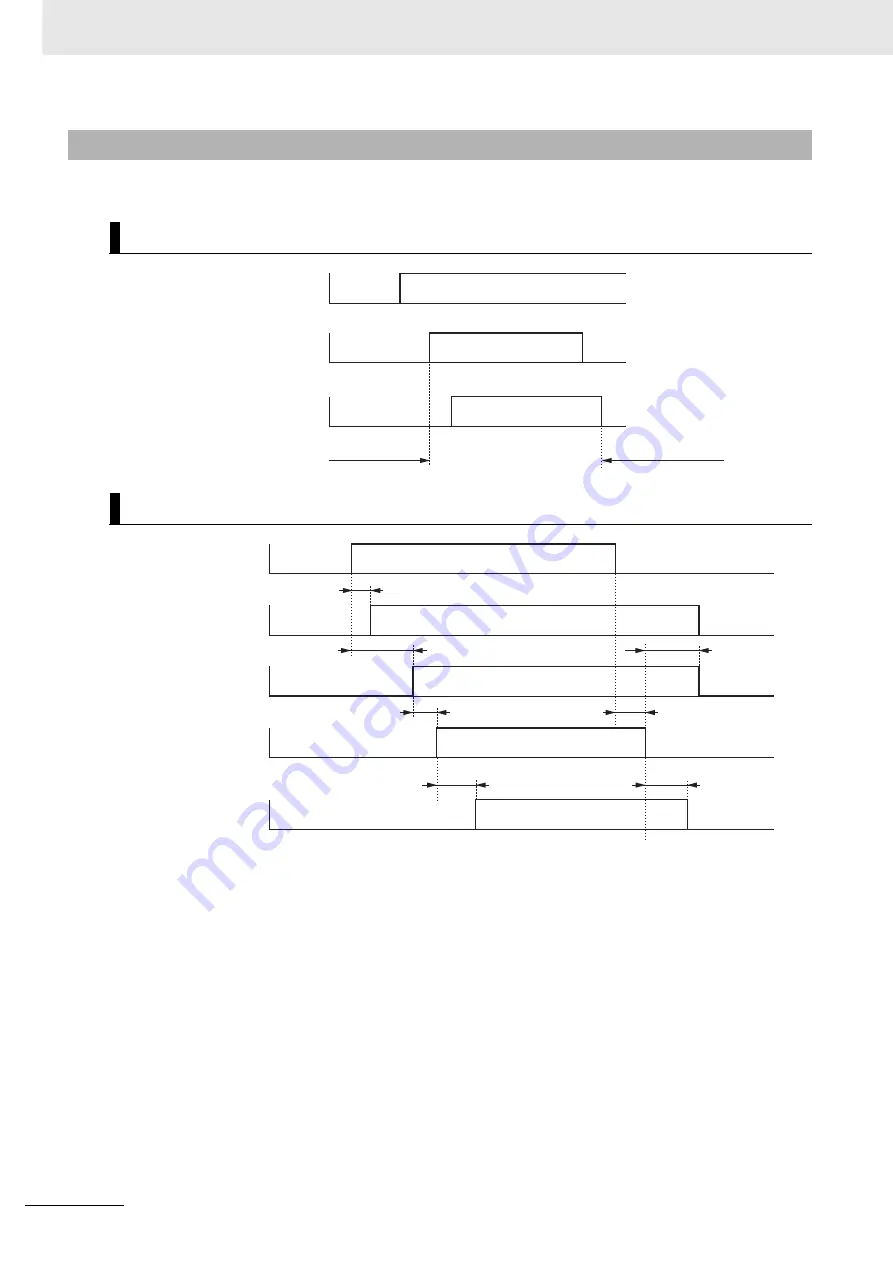
This section shows the timing of the Brake Interlock Output (BKIR).
*1. The Servo does not turn ON until the motor rotation speed drops to approximately 30 r/min or lower.
*2. The operation of the dynamic brake when the Servo is OFF depends on the set value in
Stop Selection
–
Disable Operation Option Code
(3B20-02 hex).
*3. The Brake Interlock Output (BKIR) signal is output when a release request command is received from either
servo control or EtherCAT communications. The above example shows when there is no brake release
request from EtherCAT communications.
*4. Depends on the set value in
Brake Interlock Output
–
Hardware Delay Time
(4610-04 hex).
Note The brake attraction time and release time vary depending on the Servomotor brake. For details, refer to
7-6-2
Operation Timing
Basic Timing
Servo ON/OFF Operation Timing When Motor Is Stopped
ON
OFF
ON
OFF
ON
OFF
OFF
ON
Servo ON/OFF
Brake Interlock
Output (BKIR)
Servo OFF
Servo ON
Servo OFF
Release request
Forced-braking is possible.
Forced-braking is possible.
Control power supply
(L1C, L2C)
Servo ON/OFF
ON
OFF
Dynamic
Brake
Released
Applied
Motor power supply
ON
OFF
ON
OFF
Approx. 20 ms
21 ms or more
*4
21 ms or more
*4
Approx. 80 ms
Brake Interlock
Output (BKIR)
*3
Released
Held
Attraction time
Release time
Servo OFF
Servo OFF
Servo ON
*1
DB applied
*1
DB applied
*2
DB released
Power supply
No power supply
No power supply
4610-04 hex
Release request
Holding brake
operation
Brake released
Summary of Contents for R88D-1SN01H-ECT
Page 827: ......





















































