





























Functions, monitoring, and protective functions
9.3 Drive functions
Drive converter cabinet units
310
Operating Instructions, 07/07, A5E00288214A
If an output filter (see p0230) or series inductance (p0353) is used, its data must also be
entered before the standstill measurement is carried out.
The inductance value is then subtracted from the total measured value of the leakage. With
sine-wave filters, only the stator resistance, valve threshold voltage, and valve interlocking
time are measured.
Note
Leakage values in excess of 35 to 40% of the rated motor impedance will restrict the
dynamic response of speed and current control in the voltage limit range and in field-
weakening operation.
Note
Standstill measurement must be carried out when the motor is cold. In p0625, enter the
estimated ambient temperature of the motor during the measurement (with KTY sensor: set
p0600, p0601 and read r0035). This is the reference point for the thermal motor model and
thermal R
S
/R
R
adaptation.
In addition to the equivalent circuit diagram data, motor data identification (p1910 = 3) can
be used for induction motors to determine the magnetization characteristic of the motor. Due
to the higher accuracy, the magnetization characteristic should, if possible, be determined
during rotating measurement (without encoder: p1960 = 1, 3; with encoder: p1960 = 2, 4). If
the drive is operated in the field-weakening range, this characteristic should be determined
for vector control in particular. The magnetization characteristic can be used to calculate the
field-generating current in the field-weakening range more accurately, thereby increasing
torque accuracy.
Note
In comparison with standstill measurement (p1910) for induction motors, rotating
measurement (p1960) allows the rated magnetization current and saturation characteristic to
be determined more accurately.
Lw>@
˓>@
>$@
L
>@
L
w
w
Lw
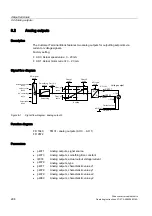
)ORZ
0DJQHWL]DWLRQFKDUDFWHULVWLF
U
S
S
S
S
S S S
S
Figure 9-2
Magnetization characteristic







































































