





























Setpoint channel and closed-loop control
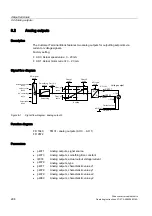
7.4 Vector speed/torque control with/without encoder
Drive converter cabinet units
288
Operating Instructions, 07/07, A5E00288214A
$FWXDOVSHHGYDOXH
6SHHGVHWSRLQW
3,
6SHHG
FRQWUROOHU
7RUTXH
VHWSRLQW
0BVHWS
0BFWUDFWLYH
0BVXSSO
0BVXSSOVFDO
0BVXSSO
0BVXSSOVFDO
0BFWUDFWLYH
S 0BFWU
-
0
1
r 1547 [ 0 ]
r 1538
r 1547 [ 1 ]
r 1539
T
i
K
p
T
n
r 1515
r 0079
≥
1
( 0 )
p 1512 [ C ]
( 0 )
p 1513 [ C ]
( 0 )
p 1511 [ C ]
( 0 )
p 1503 [ C ]
r 1406 . 12
[ FP 2520 . 7 ]
p 1501
r 1407 . 2
Figure 7-16 Closed-loop speed/torque control
The total of the two torque setpoints is limited in the same way as the speed control torque
setpoint. Above the maximum speed (p1082), a speed limiting controller reduces the torque
limits in order to prevent the drive from accelerating any further.
A "real" closed-loop torque control (with a speed that automatically sets itself) is only
possible in the closed-loop control range but not in the open-loop control range of the
sensorless closed-loop vector control. In the open-loop controlled range, the torque setpoint
changes the setpoint speed via a ramp-up integrator (integrating time ~ p1499 x p0341 x
p0342). This is the reason that sensorless closed-loop torque control close to standstill is
only suitable for applications that require an accelerating torque there and no load torque
(e.g. traversing drives). Closed-loop torque control with encoder does not have this
restriction.
OFF responses
●
OFF1 and p1300 = 22, 23
–
Response as for OFF2
●
OFF1, p1501 = "1" signal and p1300 ≠ 22, 23
–
No separate braking response; the braking response is provided by a drive that
specifies the torque.
–
The pulses are inhibited when the brake application time (p1217) expires. Standstill is
detected when the speed actual value of the speed threshold (p1226) is undershot or
when the monitoring time (p1227) started when speed setpoint ≤ speed threshold
(p1226) expires.
–
Switching on inhibited is activated.