





























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Drive converter cabinet units
Operating Instructions, 07/07, A5E00288214A
285
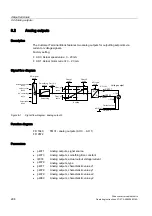
K
p _ n
T
n _ n
p 1460
p 1462
p 1463 x p 1462
p 1461 x p 1460
1
2
3
1
2
3
( n < p 1464 )
( p 1464 < n < p 1465 )
( n > p 1465 )
0 p
1464 p
1465
n
K
p _ n
T
n _ n
,QWHJUDOWLPH
&RQVWDQWORZHUVSHHGUDQJH
ZLWKRXWDGDSWDWLRQ
ZLWKDGDSWDWLRQ
3URSRUWLRQDOJDLQ
$GDSWDWLRQUDQJH
&RQVWDQWXSSHUVSHHGUDQJH
Figure 7-14 Example of speed-dependent adaptation
Function diagram
FP 6050
Kp_n-/Tn_n adaptation
Parameters
•
p1400.5 Speed control configuration: Kp/Tn adaptation active
Free Kp_n adaptation
•
p1455
Speed controller P gain adaptation signal
•
p1456
Speed controller P gain adaptation lower starting point
•
p1457
Speed amplifier P gain adaptation upper starting point
•
p1458
Adaptation factor lower
•
p1459
Adaptation factor upper
•
p1470
Speed controller encoderless operation P gain
Speed-dependent Kp_n/Tn_n adaptation (VC only)
•
p1460
Speed controller P gain adaptation speed lower
•
p1461
Speed controller P gain adaptation speed upper
•
p1462
Speed controller integral time adaptation speed lower
•
p1463
Speed controller integral time adaptation speed upper
•
p1464
Speed controller adaptation speed lower
•
p1465
Speed controller adaptation speed upper
•
p1466
Speed controller P gain scaling
Dynamic response reduction field weakening (encoderless VC only)
•
p1400.0 Speed control configuration: Automatic Kp/Tn adaptation active