





























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Drive converter cabinet units
Operating Instructions, 07/07, A5E00288214A
291
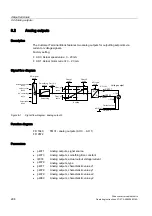
Function diagram
FP 6060
Torque setpoint
FP 6630
Upper/lower torque limit
FP 6640
Current/power/torque limits
7.4.6
Permanent-field synchronous motors
Description
Permanent-field synchronous motors that are equipped with a position encoder or a pulse
encoder with zero mark are supported.
Permanent-field synchronous motors without encoders are also supported for operation
without encoders. Controlled operation is not possible when the motor is stationary.
Typical applications include direct drives with torque motors which are characterized by high
torque at low speeds, e.g. Siemens complete torque motors from the 1FW3 series. When
these drives are used, gear units and mechanical parts subject to wear can be dispensed
with if the application allows this.
WARNING
As soon as the motor starts to rotate, a voltage is generated. When work is carried out on
the converter, the motor must be safely disconnected. If this is not possible, the motor must
be locked by a holding brake, for example.
Features
●
Field weakening of up to approx. 1.2 x rated speed (depending on the supply voltage of
the converter and motor data; (see also supplementary conditions)
●
Flying restart (during operation without encoders, only when a VSM module is used to
record the motor speed and phase angle (option K51))
●
Speed and torque control vector
●
V/f control for diagnostics vector
●
Motor identification
●
Automatic rotary transducer adjustment (calibration of the encoder’s zero position, not for
operation without encoders)
●
Speed controller optimization (rotary measurement)