





























Functions, monitoring, and protective functions
9.2 Active Infeed functions
Drive converter cabinet units
306
Operating Instructions, 07/07, A5E00288214A
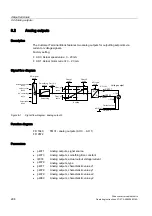
9.2.4
Settings for the infeed (Active Infeed) under difficult line conditions
Description
The following setting examples are taken from commissioning procedures and are not
generally valid! The required control characteristics must be checked again after the settings
have been made.
Example 1: Infeed to a generator functioning as an energizing supply
Infeed error during line identification, power failure (F6200, A6205)
Following procedure:
1.
Exclude other sources of fault: e.g. actual power failure, wiring fault, correct supply data
setting (p0210, p0211)
2.
Reset the infeed parameters, re-enter the supply data
3.
p0281 Line supply overvoltage, warning threshold = 150%
p0283 Line supply undervoltage, shutdown (trip) threshold = 50%
p0284 Line supply frequency exceeded, alarm threshold = 125%
p0285 Min. line supply frequency not maintained, alarm threshold = 75%
→ Start supply ID (p3410 = 5)
4.
If 3. is not successful, then in addition:
Reduction in excitation current p3415[0] = 4%, p3415[1] = 8%
→ Start supply ID (p3410 = 5)
5.
If 4. is not successful, then in addition (for FW ≤ 2.4 only):
Gradual increase in value of infeed inductance between supply and filter p0225 (initial
value: 0.3/0.5/0.7 x p0223),
Limit p3421 to (2 x p0233)
→ Start each supply ID
6.
If 5. is not successful, then in addition:
p3463 Infeed, line angle change, phase failure detection = 20° ... 40°
p3458[1] Infeed PLL smoothing time = 8 ms .. 25 ms
p3472[1] Reduce infeed supply voltage smoothing time to 20 ms ... 100 ms
(both parameters only visible at service access level)
-→ Start supply ID
7.
If 6. is not successful, then in addition:
Change controller gain p3560 = 10% .. 300 % (Vdc controller)
Note
The service parameters can only be accessed by authorized Siemens personnel.
If a particular setting is not possible or special application-specific supplementary
conditions are present, individual steps can also be omitted.
8.
If no return feed possible in regenerative operation: p3533 = 1 (inhibit regenerative
operation)