280
Inverter Positioning
Section 5-3
Output Coefficient after
Pulse Output
5-3-9
Automatic Calculation of Inverter Frequency Command Value
Set the Power Supply Frequency for One Motor Revolution per Second, Num-
ber of Encoder Pulses for One Motor Revolution, and Error Counter Cycle in
the PLC Setup to automatically calculate the inverter frequency command
value and store it in A23 for inverter positioning 0 and A33 for inverter posi-
tioning 1.
Note
The inverter frequency command values are stored in A23 and A33
in increments of 0.01 Hz. Divide the value in A23 or A33 by 100 to
obtain the value in hertz.
The values stored in A23 and A33 can be used in converting the output value
to the frequency command value for the inverter. This value can be output to
the inverter from the program using serial communications or an Analog Out-
put Unit.
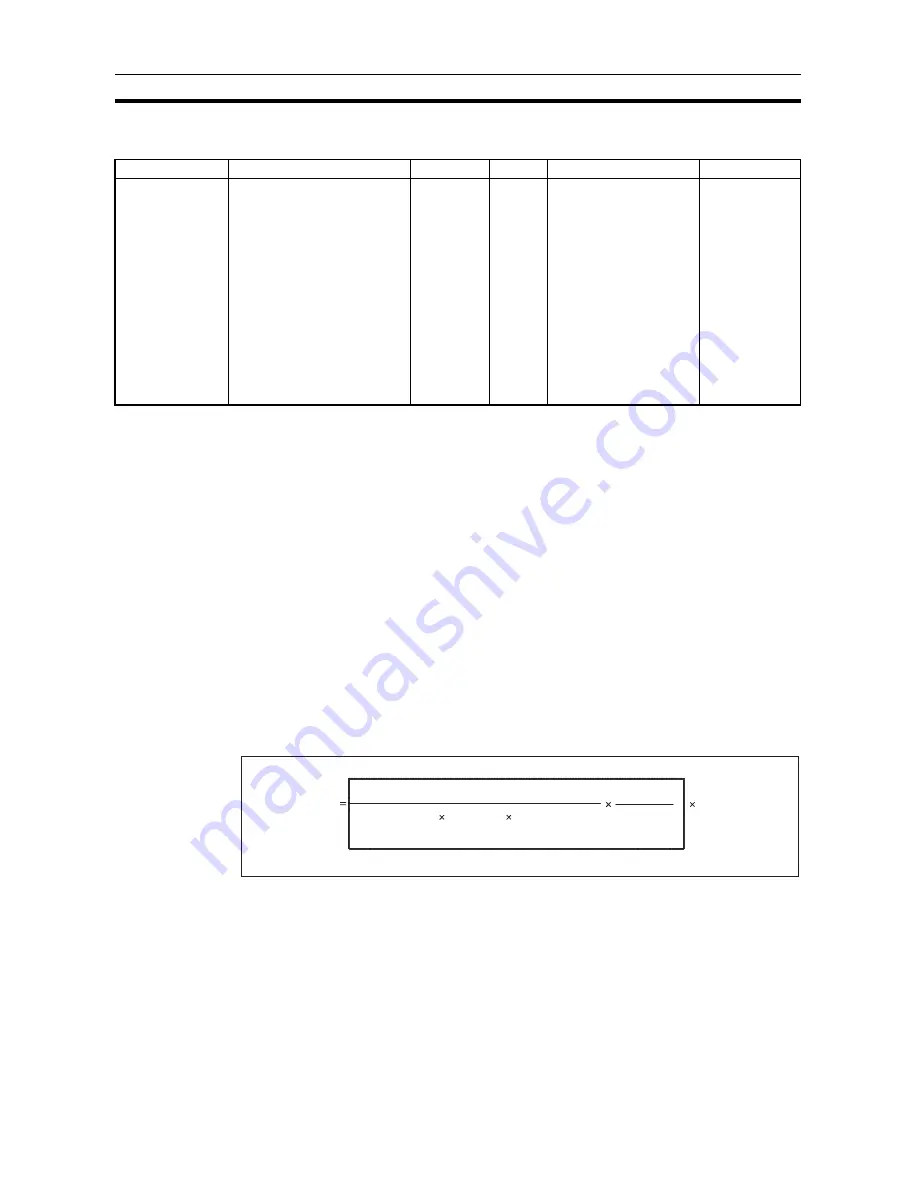
Note
The following formula is used inside the PLC to automatically cal-
culate the inverter frequency command value from the output value
(i.e., the error counter present value multiplied by the gain). (The
output value is stored in A20 and A21 for inverter positioning 0 and
in A30 and A31 for inverter positioning 1.)
Note
(1) Calculate the power supply frequency for one revolution per second from
the motor specifications. For example, with a 1,800-r/min (60-Hz) motor
(30 r/s), the power supply frequency for one revolution per second would
be calculated as follows: 60 [Hz]
÷
30 [r/s] = 2 [Hz].
(2) The encoder resolution times the counter multiplier times the gear ratio
equals the number of pulses output by the encoder for one motor shaft
revolution.
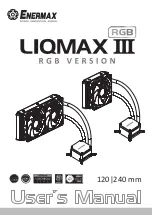
Setting
Description
Set value
Default
Application
Refresh timing
Output coefficient
after pulse output
The output value can be
changed by multiplying the
value in the error counter by a
coefficient after deceleration of
internal pulse output.
Output value =
Error
×
Error counter cycle (s)
×
Gain
×
Coefficient
Note
The setting is made in
increments of 0.01. The
coefficient will thus be
the set value times 0.01.
For example, if the set
value is 10, the coeffi-
cient will be 0.1 ms.
1 to 255
(0.01 incre-
ments)
Setting 0 is
the same as
setting 50
(0.01 incre-
ments).
0: 50
(0.01
incre-
ments)
This coefficient can be
used to reduce the output
value when it the value in
the error counter is too
large after completing
internal pulse output.
When CPU Unit
power is turned
ON
A20/A21
A30/A31
(See
note 1.)
(See
note 2.)
1
Inverter frequency
command value (Hz)
Conversion Factor
Motor frequency for 1 rotation per second (Hz)
Encoder resolution
(pulses/rotation)
High-speed
counter
multiplier
Motor-encoder
shaft gear
ratio
Error counter
cycle (s)
Output value
Note:
The inverter frequency command value is stored in A23/A33 in increments of 0.01 Hz.
Summary of Contents for CP1L - 12-2007
Page 3: ...iv...
Page 9: ...x...
Page 13: ...xiv TABLE OF CONTENTS...
Page 21: ...xxii...
Page 33: ...xxxiv Conformance to EC Directives 6...
Page 65: ...32 Function Blocks Section 1 5...
Page 428: ...395 Clock Section 6 9...
Page 429: ...396 Clock Section 6 9...
Page 523: ...488 Troubleshooting Unit Errors Section 9 4...
Page 531: ...496 Replacing User serviceable Parts Section 10 2...
Page 563: ...528 Auxiliary Area Allocations by Function Appendix C...
Page 611: ...576 Auxiliary Area Allocations by Address Appendix D...
Page 638: ...603 Connections to Serial Communications Option Boards Appendix F Connecting to Unit...
Page 639: ...604 Connections to Serial Communications Option Boards Appendix F...
Page 669: ...634 Index...
Page 671: ...636 Revision History...