





























184
7 PARAMETERS
7.2 Detailed list of parameters
Extension setting parameters ([Pr. PC_ _ ])
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
CP
PS
PC29
*COPB
Function
selection C-B
_ _ _ x
For manufacturer setting
0h
_ _ x _
0h
_ x _ _
0h
x _ _ _
Torque POL reflection selection
The torque polarity can be changed with the combination of this parameter and [Pr. PA14 Rotation
direction selection/travel direction selection].
0: Enabled
1: Disabled
The torque command polarity can be changed only when [Pr. PA14] is set to "1", and "0" is set to
this digit.
This parameter corresponds to "Polarity (607Eh)". When the object is mapped to the cyclic
communication data, do not write values with MR Configurator2 because the controller overwrites
the servo parameter values written with MR Configurator2.
1h
PC67
FEWL
Following error
output level
(lower four digits)
Set a following error output level.
Upper and lower are a set.
When the state in which droop pulses
the parameter setting value continues for the time set in [Pr.
PC69 Following error output filtering time], "Statusword bit 13 Following error" will be turned on.
However, setting "FFFFh FFFFh" will disable it.
The unit will be as follows depending on the positioning mode.
• Point table method
The unit can be changed to 10
STM
[µm], 10
(STM-4)
[inch], 10
-3
[degree], or [pulse] with the setting of
[Pr. PT01].
The unit [degree] is used with servo amplifiers with software version A6 or later.
• Indexer method
It will be command unit [pulse]. (unit of a load-side rotation expressed by the number of servo motor
resolution pulses)
Refer to the Function column of [Pr. PA10] for the command unit.
Set the setting value in hexadecimal.
Setting range: 00000000h to FFFFFFFFh (0 to 4294967295)
0000h
Refer to
Function
column
for unit.
PC68
FEWH
Following error
output level
(upper four digits)
00C0h
Refer to
Function
column
for unit.
PC77
TL2
Internal torque
limit 2
The parameter is for limiting the torque of the servo motor. Set this on the assumption that the rated
torque is 100.0 %.
When this parameter is set to "0.0", torque is not generated.
In the positioning mode (indexer method), the setting value of this parameter is enabled while
automatic operation, manual operation and home position return operation is stopped. During
operation, the setting values of [Pr. PA11] and [Pr. PA12] are enabled.
If the software version of the servo amplifier is A3 to A6, this parameter can be used only in the
positioning mode (indexer method).
If the software version of the servo amplifier is A7 or later, this parameter can be used in the
positioning mode (point table method) and positioning mode (indexer method). The internal torque
limit selection function can be used to enable/disable this parameter. Refer to the following for
details.
Page 250 Internal torque limit selection
Setting range: 0.0 to 1000.0
0.0 [%]
Setting value
Servo motor rotation direction/travel
direction
Torque mode
Torque command:
positive
Torque mode
Torque command:
negative
[Pr. PA14]
[Pr. PC29]
0 _ _ _ : Enabled
CCW or positive direction
CW or negative direction
0
1 _ _ _ : Disabled
CCW or positive direction
CW or negative direction
0 _ _ _ : Enabled
CW or negative direction
CCW or positive direction
1
1 _ _ _ : Disabled
CCW or positive direction
CW or negative direction
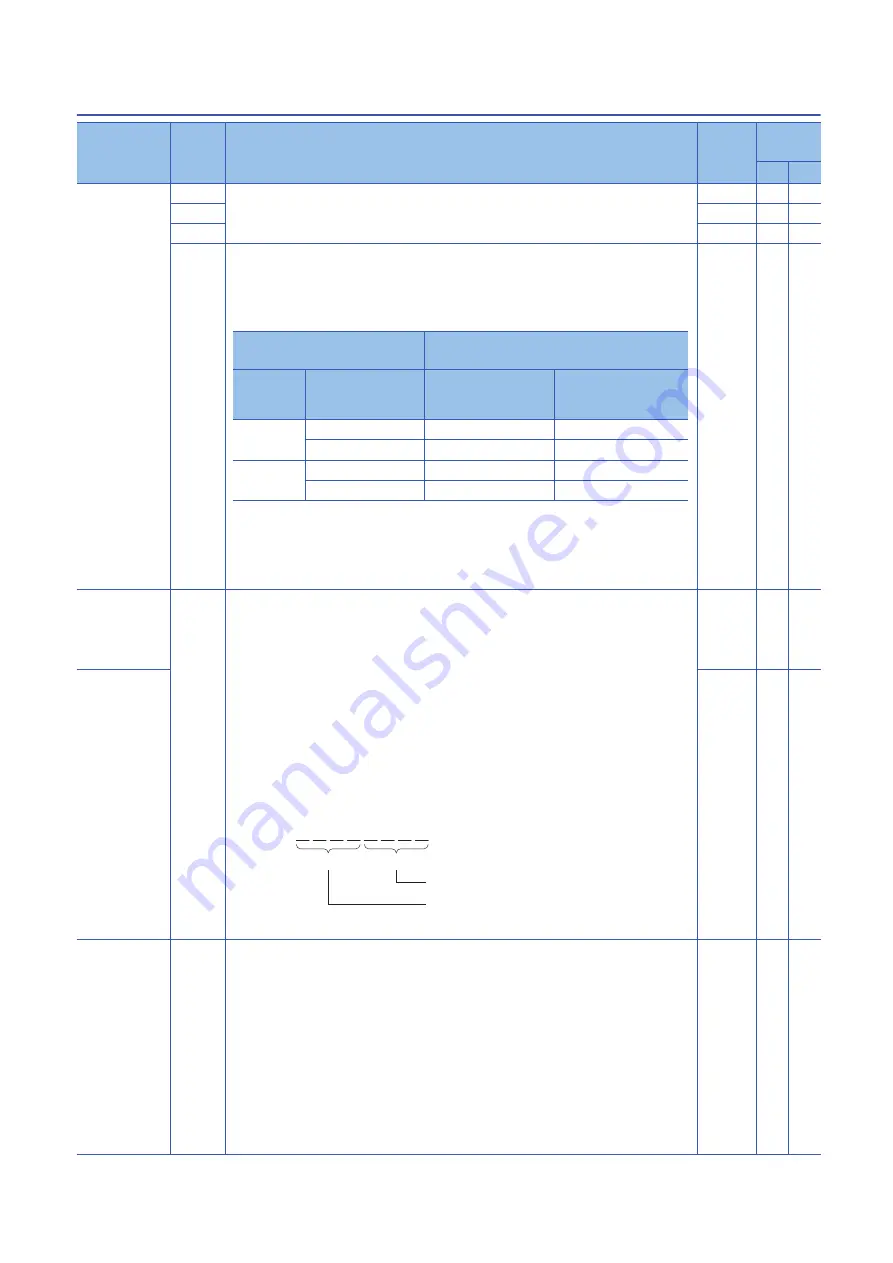
[Pr. PC67]
[Pr. PC68]
Setting value:
Upper four digits Lower four digits







































































