




























244
9 MANUFACTURER FUNCTIONS
9.5 Simple cam function
Clutch
Use the clutch when starting or stopping the servo motor by transmitting or shutting commands from the main shaft to the
output axis module side with the clutch on/off.
Set whether or not to use the clutch control with [Cam control data No. 36 - Main shaft clutch control setting].
Although the clutch ON/OFF can be changed during cam control, the setting of [Cam control data No. 36] cannot be changed
from "1 (Clutch command ON/OFF)" to "0 (No clutch)" during cam control.
ON control mode
■
"No clutch"
When [Cam control data No. 36 - Main shaft clutch control setting] is set to "0 (No clutch)", other clutch parameters are not
used due to direct coupled operation.
■
Clutch command ON/OFF
The clutch is turned on/off by turning on/off bit 11 of Control DI2 (2D02h).
(Settings in the OFF control mode are not used in the clutch command ON/OFF mode.)
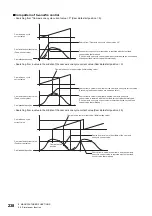
Clutch smoothing method
Smoothing is processed with the time constant set in [Cam control data No. 43 Main shaft clutch smoothing time constant] at
clutch ON/OFF. Even after clutch ON smoothing is completed, smoothing is processed with the set time constant if the speed
of the input values changes.
The travel distance from turning on to off of the clutch does not change with smoothing.
Time constant system exponential curve smoothing
Set [Cam control data No. 42 - Main shaft clutch smoothing system] to "1 (Time constant system (Exponent))".
t
t
Control DI 2 bit 11
Status DO 2 bit 11
Current value before clutch input
Travel distance after clutch output
t
t
63 %
63 %
Speed before clutch processing
Speed after clutch smoothing
Clutch smoothing time constant







































































