




























7 PARAMETERS
7.2 Detailed list of parameters
195
7
PT51
STC
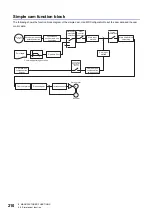
S-pattern
acceleration/
deceleration time
constant
This parameter is used to smooth start/stop of the servo motor or linear servo motor.
Set the time of the arc part for S-pattern acceleration/deceleration.
Setting "0" will make it linear acceleration/deceleration.
The actual operation time for the arc part is limited as shown by the following calculations. Thus, if a
large value is set to STA (acceleration time constant) or STB (deceleration time constant), the actual
operation time for the arc part may differ from the setting value of the S-pattern acceleration
deceleration time constant. The setting will be disabled during home position return.
When a value exceeding 1000 ms is set, the parameter value will be clamped to 1000 ms.
The upper limit value of the actual time for the arc part is limited by
(Example) At the setting of STA = 20000, STB = 5000 and STC = 200, the actual times for the arc
part are as follows:
Setting range: 0 to 5000
0 [ms]
PT65
PVC
Jog speed
command
Set the Jog speed command.
The fractional portion of the parameter will be rounded down.
Setting range: 0.00 to instantaneous permissible speed
100.00 [r/
min]/[mm/
s]
PT69
ZSTH
Home position
shift distance
(extension
parameter)
Set the extension parameter of [Pr. PT07].
When [Pr. PT69] is used, the home position shift distance is calculated as follows.
Home position shift distance = [Pr. PT07] + ([Pr. PT69] × 65536)
Refer to section 4.6 of "MR-J4-_GF_(-RJ) Servo Amplifier Instruction Manual (Motion Mode)" for the
home position shift direction.
The unit will be as follows depending on the positioning mode.
• Point table method
The unit can be changed to [µm], 10
-4
[inch], 10
-3
[degree], or [pulse] with the setting of [Pr. PT01].
• Indexer method
It will be command unit [pulse]. (unit of a load-side rotation expressed by the number of servo motor
resolution pulses)
Refer to the Function column of [Pr. PA10] for the command unit. Additionally, when a value equal to
or more than "1001" is set, the value will be clamped to "1000".
Setting range: 0 to 32767
0
Refer to
Function
column
for unit.
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
CP
PS
0 [r/min]
Ta
Ta + STC
Tb
Tb + STC
Acceleration time
constant
Deceleration time
constant
Rated speed
Preset speed
Servo motor
speed
Ta: Time until preset speed is
reached
Tb: Time until stop
2000000
2000000
for acceleration and by
for deceleration.
STA
STB
During acceleration: 100 ms
2000000
= 100 [ms] < 200 [ms]
20000
Therefore, it will be limited to 100 [ms].
During deceleration: 200 ms
2000000
= 400 [ms] > 200 [ms]
5000
Therefore, it will be 200 [ms] as you set.







































































