






















6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
101
6
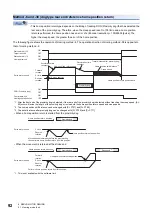
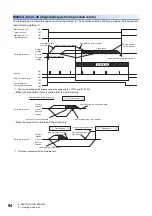
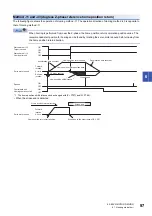
• When used with address increasing direction specification ([Pr. PT03] = _ 3 _ _)
If position data 270.000 degrees (target position) is specified, rotates in the CCW direction.
If position data -270.000 degrees (target position) is specified, rotates in the CCW direction.
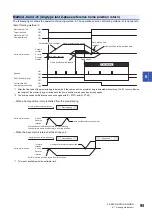
Incremental value command method
As position data, set the travel distance from the current address to the target address.
■
mm, inch, pulse units
Setting range: 0 to 999999 [×10
STM
m] (STM = Feed length multiplication [Pr. PT03])
0 to 999999 [×10
(STM-4)
inch] (STM = Feed length multiplication [Pr. PT03])
0 to 999999 [pulse]
■
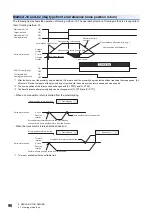
degree unit
(270)
Target position
Current position
(270)
Target position
Current position
Current address
Target address
Position data = |Target address - Current address|
270 degrees
80 degrees
0 degree
Position data = travel distance from the current address to the target address
The travel distance in this example is -170 degrees.
Current address
Target address







































































